AIM, 로봇·비전 통합 자동화 플랫폼 ‘AIMFactoryCore’ 공개
사진. 에이아이엠 자동화 솔루션 기업 에이아이엠(이하 AIM)이 로봇과 비전을 하나의 플랫폼으로 통합한 신규 소프트웨어 ‘AIMFactoryCore’를 앞세워 제조 자동화 시장 공략에 나선다. 기존 비전 중심 시스템에서 한 단계 확장된 구조를 통해

(주)티이에스의 2족 보행로봇 교육-2족 보행 로봇의 모델베이스 개발(SILS)
최근 제어시스템 개발에 있어서 모델 베이스 개발(MBD; Model Based Development)이라고 불리는 개발방법이 주목받고 있다. MBD에 있어서의 SILS(Software In the Loop Simulation)는 시뮬레이션 환경상에 구축된 제어대상의 모델에 대하여 제어측을 소프트웨어로써 평가/검증하는 것이다.
본 내용은 2족 보행로봇 교재 「e-nuvo(ZMP社)」를 사용하여, 로봇 제어측의 평가/검증을 SILS(MATLAB/Simulink상에 구축)로 한 사례를 소개한다. <편집자 주>
도입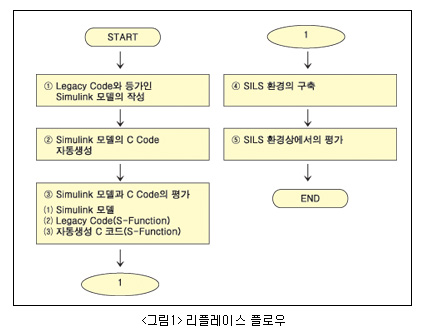
일반적으로 설계/개발에 있어서 기존 시스템의 Legacy(자산)을 활용하면서 Legacy의 일부를 신규로 치환해 가는 것은 많이 볼 수 있다.
본 내용은 2족 보행로봇의 제어측 설계의 Legacy에서 MBD로의 리플레이스를 상정하고 MBD의 수법으로 어떻게 이루어지는지 <그림 1>의 플로우에서 그에 따른 사례를 나타낸다. 단, Legacy의 일부 치환을 특화한다는 생각이 아니고 플로우에서 Legacy Code 항을 제거하면 일반적인 신규 시스템에 있어서의 SILS 플로우로 볼 수 있다.
e-nuvo에 대하여
2족 보행로봇 e-nuvo는 각 다리 6관절, 합 12관절을 갖추고 있다. 「1관절」=「1모터」=「1자유도」이므로 12자유도를 가진 2족 보행로봇이라고 표현 가능하다. 각 관절의 회전방향은 발목(롤 방향과 피치 방향의 2자유도), 무릎(피치 방향만 1자유도), 고관절(피치ㆍ롤ㆍ요 3자유도)이다.
e-nuvo의 동작을 결정하는 12관절의 각도 설정치는 e-nuvo의 외부에서 시계열(時系列) 데이터로서 얻어진다.
<그림 2>의 서브 CPU 기판상의 H8S(주식회사 르네사스 테크놀로지)에 실장된 소프트웨어로부터 관절각도의 설정치 추종 PID 제어가 이루어지고, 관절각은 센서(포텐셔미터)에 의해 얻어진다. DC Gear Driven Motor는 H 브리지로 PWM 제어된다.
SILS에 대하여
·도입
본 내용에서는 <그림 1>의 플로우에 기초하여 데모에 있어서의 SILS의 공정을 설명하겠다.
(1) Legacy Code와 등가인 Simulink모델 작성
본 데모에서 사용하는 Legacy Code는 <그림 2>에서 PID 제어측을 기술한 것이다.
Legacy Code에서는 각 변수에 다양한 수치형(數値型)을 지정하고 있고, Simulink 모델에서는 각 개소(個所)에서 그 형(型)에 맞추는 것이 필요하다.
 (2) Simulink 모델과 C코드 자동생성
(2) Simulink 모델과 C코드 자동생성
Simulink 모델에서 C코드를 자동생성하고 타깃으로 실장하는 기술은 MBD를 떠받치는 기간(基幹) 중 하나라고 말할 수 있다.
Simulink 모델에서 Simulink 옵션의 Real-Time Workshop 및 Real-Time Workshop Embedded Coder를 사용하고 실장에 따라 적합한 C코드 자동생성을 행하는 것이 가능하다.
(3) Simulink 모델과 C코드의 평가
C코드와 Simulink 모델의 등가 확인에는 이하의 순서가 유효한 수법 중 한가지이다.
C코드를 S-Function에 입력하고 Simulink 환경상에 Simulink 모델과 S-Function에 동일하게 입력을 줄 때 같은 출력이 나오는지를 평가한다.
(4) SILS 환경의 구축
오른쪽 다리 무릎의 관절 이외의 관절에는 각도, 각속도 및 각가속도로 구성된 모션 데이터가 주어지고, 오른쪽 다리 무릎의 관절에 대하여 이하와 같이 SILS를 구축한다.
2족 보행로봇의 기구계통, 전기계통을 합한 모델을 제어 대상으로 한다.
기구계통 모델은 SimMec-hanics로, 전기계통 모델은 SimPowerSystems의 DC모터와 H 브리지, PWM 생성기 및 기어 등으로 구성한다.
PID 제어측이 되고 Simulink모델, Legacy Code 및 자동생성 C코드를 적당히 절환시킨다. 각각 Legacy Code, 자동생성 C코드를 Lap한 S-Function이다.
이 모델의 목표는 <그림 2>에 있는 관절 1개분의 PID 제어 구조를 시뮬레이션 환경상에서 재현하고 Simulink, Legacy Code 및 자동생성 C코드의 평가를 행하는 것이다.
(5) SILS 환경상에서의 평가
실기와 같은 설정치에 대하여 조금 늦은 기미로 추종하는 경향이 확인 가능하고 출력하는 Duty비도 확인할 수 있다.
·사용 TOOL 등
MATLAB, Simulink, SimMc-hanics, SimPowerSystems, Real-Time Workshop, Real-Time Workshop Embedde Coder
사진. 에이아이엠 자동화 솔루션 기업 에이아이엠(이하 AIM)이 로봇과 비전을 하나의 플랫폼으로 통합한 신규 소프트웨어 ‘AIMFactoryCore’를 앞세워 제조 자동화 시장 공략에 나선다. 기존 비전 중심 시스템에서 한 단계 확장된 구조를 통해

일체형 미니 델타로봇 시스템 / 사진. 로봇기술 고속 픽 앤 플레이스에 특화된 올인원 시스템 (주)아톰로봇코리아(이하 아톰로봇코리아)가 일체형 구조의 미니 델타로봇 시스템을 공개했다. 이 미니 델타로봇 시스템은 소형 델타로봇과 산업용 카메라, 소프트웨어 및 플렉시블 피
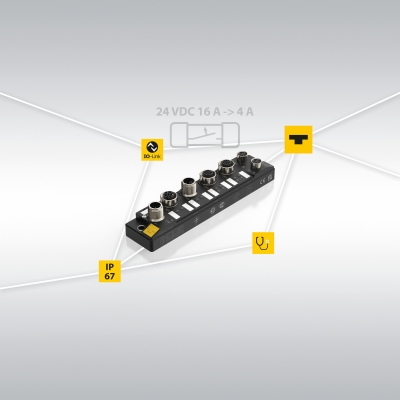
TBIF 시리즈 / 사진. 터크 산업 자동화 솔루션 기업 터크가 IO-Link 기반 전자 퓨즈와 분산형 컨베이어 제어 모듈을 통해 제어 캐비닛 없는 현장 중심 자동화 아키텍처를 제시했다. IP67 등급의 견고한 설계와 IIoT 연계 기능을 바탕으로, 유지보수 효율성과

사진. 사우스코 사우스코가 강력한 실링 기능과 널찍한 인체공학적 T-핸들을 단일 컴팩트 하드웨어 형태로 제공하는 새로운 ‘N5 리프트 앤 턴 압축 래치’를 출시했다. 이번에 출시된 N5 압축 래치는 극한 환경에서도 인체공학적으로 작동하도록 설계됐다


물류 산업의 디지털 전환은 단순 자동화를 넘어 네트워크 기반 공동화 구조로 진화하는 흐름이다. 로지스올(주)이 제시하는 ‘피지컬 인터넷(Physical Internet)’ 전략은 물류 자원의 표준화·공유를 통해 효율을 극대화하려는 시도
자율주행 로봇 기술의 산업 현장 적용 확대 흐름은 제조 자동화 패러다임 전환의 핵심 요소다. 특히 복잡성과 비정형성이 공존하는 중소·중견 제조현장에서의 실질적 적용 가능성은 기술 경쟁력 판단 기준이다. (주)폴라리스쓰리디의 AMR 전략과 SMD 라인 특화