한국로봇산업진흥원, 체코와 첨단로봇산업 협력센터 출범
사진. 한국로봇산업진흥원 한국과 체코가 첨단 로봇산업 분야 협력을 확대하기 위한 공동 거점을 구축하고 글로벌 로봇산업 협력 강화에 나섰다. 한국로봇산업진흥원은 6월 18일(목, 현지시간) 체코 프라하공과대학교(CTU)에서 '한국-체코 첨단로봇산업 협력센터(Kor

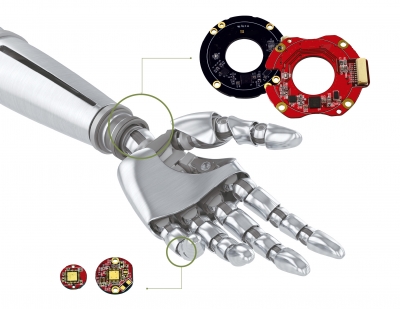
영전자석과 자기유변탄성체 발바닥 디자인 채택

카이스트 기계공학과 연구팀이 벽과 천장을 이동할 수 있는 사족 보행 로봇을 개발했다. / 사진. 카이스트
카이스트 기계공학과 박해원 교수 연구팀이 철로 이뤄진 벽면과 천장을 빠른 속도로 이동할 수 있는 사족 보행 로봇을 개발했다고 26일 밝혔다.
박 교수 연구팀은 이를 위해 전자기력을 온-오프(on-off)할 수 있는 영전자석(Electropermanent Magnet)과 고무와 같은 탄성체에 철가루와 같은 자기응답인자를 섞어 만든 탄성체인 자기유변탄성체(Magneto-Rheological Elastomer)를 이용해 자석의 접착력을 빠르게 끄거나 켤 수 있으면서도 평탄하지 않은 표면에서 높은 접착력을 지니는 발바닥을 제작해, 연구실에서 자체 제작한 소형 사족 보행 로봇에 장착했다. 이러한 보행 로봇은 배, 교량, 송전탑, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물에 점검, 수리, 보수 임무를 수행하는 등 폭넓게 이용될 수 있을 것으로 기대된다.
기계공학과의 홍승우, 엄용 박사과정이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 로보틱스(Science Robotics)' 12월호에 표지를 장식하는 논문으로 출판됐다.
기존의 벽면을 오르는 등반 로봇은 바퀴나 무한궤도를 이용하기 때문에, 단차나 요철이 있는 표면에서는 이동성이 제한되는 단점을 가졌다. 이에 반해 등반용 보행로봇은 장애물 지형에서의 향상된 이동성을 기대할 수 있으나, 이동 속도가 현저히 느리거나 다양한 움직임을 수행할 수 없다는 단점이 있었다.
보행 로봇의 빠른 이동을 가능하게 하려면 발바닥은 흡착력이 강하면서도 흡착력을 빠르게 온-오프 스위칭할 수 있어야 한다. 또한, 거칠거나 요철이 있는 표면에서도 흡착력의 유지가 필요하다.
연구팀은 이러한 문제를 해결하기 위해 영전자석과 자기유변탄성체를 보행 로봇의 발바닥 디자인에 최초로 이용했다. 영전자석은 짧은 시간의 전류 펄스로 전자기력을 온-오프할 수 있는 자석으로 일반적인 전자석과 달리 자기력의 유지를 위해 에너지가 들지 않는다는 장점이 있다. 연구팀은 사각형 구조 배열의 새로운 영전자석을 제안해, 기존 영전자석과 비교해 스위칭에 필요한 전압을 현저하게 낮추면서도 보다 빠른 스위칭이 가능하게 했다.
또한, 연구팀은 자기유변탄성체를 발바닥에 씌어, 발바닥의 자기력을 현저히 떨어트리지 않으면서도 마찰력을 높일 수 있었다. 이렇게 제안한 발바닥은 무게는 169그램(g)에 불과하지만 약 535뉴턴(N)의 수직 흡착력, 445뉴턴(N)의 마찰력을 제공해 무게 8㎏의 사족보행로봇에 충분한 흡착력을 제공할 수 있음을 확인했다.
연구팀이 제작한 사족 보행 로봇은 초속 70㎝의 속도로 직벽을 고속 등반했고, 최대 초속 50㎝의 속도로 천장에 거꾸로 매달려 보행할 수 있었다. 이는 보행형 등반 로봇으로는 세계 최고의 속도다. 또한, 연구팀은 페인트가 칠해지고, 먼지, 녹으로 더러워진 물탱크의 표면에서도 로봇이 최대 35㎝의 속도로 올라갈 수 있음을 보여, 실제 환경에서의 로봇의 성능을 입증했다. 로봇은 빠른 속도를 보여줄 뿐 아니라, 바닥에서 벽으로, 벽에서 천장으로 전환이 가능하고, 벽에서 돌출돼 있는 5㎝ 높이의 장애물도 무난히 극복할 수 있음을 실험적으로 보였다.

개발한 사족 보행 로봇이 다양한 보행을 하고 있는 모습 / 사진. 카이스트
연구팀이 개발한 새로운 등반 사족 보행 로봇은 배, 교량, 송전탑, 송유관, 대형 저장고, 건설 현장 등 철로 이루어진 대형 구조물의 점검, 수리, 보수에 폭넓게 활용될 수 있을 것으로 기대된다. 특히 이러한 곳에서의 작업은 추락, 질식 등의 심각한 위험성이 존재하고 있어, 자동화의 필요성이 시급한 곳이다.
공동 제1 저자인 기계공학과 엄용 박사과정은 “영전자석과 자기유변탄성체으로 구성된 발바닥과 등반에 적합한 비선형 모델 예측제어기를 이용해, 지면뿐만 아니라 벽과 천장을 포함한 다양한 환경에서도 보행 로봇이 민첩하게 움직일 수 있음을 보였고 이는 보행 로봇의 이동성과 작업 공간을 2D에서 3D로 확장하는 초석이 될 것이다”라며 “이러한 로봇은 조선소와 같은 철제 구조물에서 위험하고 힘든 작업을 수행하는 데 활발히 사용될 수 있을 것이다”라고 말했다.
한편 이번 연구는 한국연구재단 개인기초연구사업(중견)과 한국조선해양의 지원을 받아 수행됐다.
사진. 한국로봇산업진흥원 한국과 체코가 첨단 로봇산업 분야 협력을 확대하기 위한 공동 거점을 구축하고 글로벌 로봇산업 협력 강화에 나섰다. 한국로봇산업진흥원은 6월 18일(목, 현지시간) 체코 프라하공과대학교(CTU)에서 '한국-체코 첨단로봇산업 협력센터(Kor

□ 한국기계산업진흥회(회장 박상현, 이하 KOAMI)가 대한민국 기계·제조산업 전시회의 글로벌 경쟁력을 극대화하기 위해 100% 출자하여 설립한 전시전문법인 ㈜코아미메쎄(KOAMI Messe)가 공식 출범했다. 코아미메쎄는 전 코엑스 출신의 전시산업 전문가

사진. LG CNS LG CNS와 두산이 인공지능(AI), 로봇, 데이터센터, 클라우드 분야에서 전략적 협력에 나서며 미래 성장동력 확보를 위한 공동 행보를 본격화한다. LG CNS는 6월 18일(목) 서울 마곡 LG사이언스파크 본사에서 두산과 'AX&middo

PI 자버 슈미트 글로벌 회장 / 사진. KPA 산업용 로봇과 협동로봇, 자율이동로봇(AMR)의 지능화가 가속화되는 가운데 산업용 네트워크 기술이 피지컬 AI 구현의 핵심 인프라로 주목받고 있다. 한국프로피버스·프로피넷협회(이하 KPA)는 지난 5월 22일


클린룸 환경은 반도체, 디스플레이, 이차전지 산업의 품질 경쟁력을 결정하는 핵심 요소다. 생산 장비의 고속화가 진행되면서 케이블 보호 부품에서도 분진과 소음 저감 기술의 중요성이 높아지고 있다. 이에 씨피시스템(주)이 케이블체인과 전선관 분야의 국산화 기술을 바탕으로

제조 자동화의 무게중심이 ‘엔지니어링’에서 ‘로보틱스’로 빠르게 이동하고 있다. 로보틱스라는 용어는 이제 설비의 한 구성요소를 넘어 공장 자동화를 위한 보다 포괄적인 의미를 담고 있다. 이 같은 상황에서 아비만로보틱스(주)는