터크, 경사 스위치부터 IIoT 플랫폼까지 신제품 공개
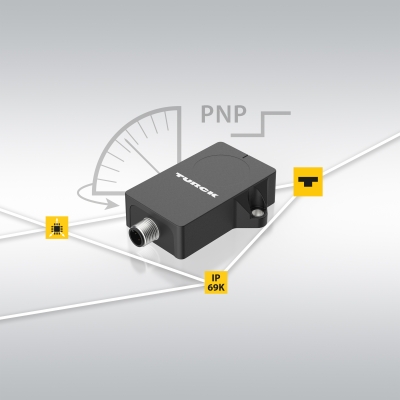
B1N180V-QR20 / 사진. 터크 산업 자동화 전문기업 터크(Turck)가 경사 스위치와 IO-Link 마스터, 유량 센서, 유도형 링 센서, IIoT 플랫폼 등 산업 현장의 디지털화와 스마트 자동화를 지원하는 신제품 및 솔루션을 잇달아 공개했다. 이번에 선보인

로봇을 움직이는 「maxon drives」
|
로봇을 움직이는 「maxon drives」 |
로봇이 컴퓨터에 탑재되고, 무너진 건물에서 부상자를 구조하며, 장애인들의 사회복귀를 돕는다. 이 뿐만이 아니다. 환자를 수술하고, 멀리 떨어진 우주에서 다른 세계를 발견하는 것도 로봇이 하고 있는 일이다. 이런 로봇의 개발에 맥슨모터(maxon motor)의 드라이브 시스템(drive system)이 활용되고 있다. 본 지면에서는 맥슨모터의 드라이브 시스템이 로봇에서 어떻게 사용되며, 정확히 무엇을 작동시키는지 살펴보고자 한다.
 연재순서
연재순서
# 1. 화성 탐사 로봇 # 2. 수술용 로봇
# 3. 로봇 슈트 # 4. 로봇 팔
# 5. 구조용 로봇 # 6. 수중용 로봇
수중로봇 나로(Naro)
#5 재난 지역에서 구조 로봇이 어떻게 작동할까?
1995년 일본 고베를 초토화시킨 끔찍한 지진은 ‘구조로봇’ 개발을 위한 거대 연구프로그램의 시발점이 되었다. 그 후 전 세계에서는 매년 구조로봇의 성과를 시험하는 경쟁이 시작되었다.
구조 로봇 ‘ROBHAZ-Rescue’
ROBHAZ-Rescue는 한국과학기술연구원 지능로봇센터의 구조로봇이다. 이 로봇은 통행이 불가능한 지역을 수색하고 구조하는 임무를 수행 할 수 있는 다양한 장비를 갖추고 있다.
복잡한 지형에의 뛰어난 적응성 덕분에 로봇은 40˚ 경사의 계단까지 오를 수 있다. 레이저 스캐너, 열과 이산화탄소 센서, 무선마이크, 그리고 회전식 로봇의 목에 설치된 디지털 카메라는 재난지역의 가장 포괄적인 화면을 보여주고 그 안에 갇힌 사람들을 구조하는데 도움을 준다.
맥슨 EC-powermax의 힘
맥슨 EC-powermax는 다양한 환경 조건에서도 약60kg의 하중을 가진 로봇들을 시속 10km 이상으로 움직일 수 있게 한다. 맥슨의 또 다른 정밀모터는 비디오카메라가 장착된 조종 팔을 구동시킨다. RoboCup에서 시행한 가상환경에서 이러한 구조로봇들의 뛰어난 능력이 입증되었다. 한 예로, 잠재위험 속 희생자를 찾기 위해 면밀히 살펴야하는 구조지역의 무너진 구조물 안을 다양한 영상으로 보여주기도 하였다. 또한 이동 중에 이산화탄소와 열을 방출하고, 때때로 도움을 요청하는 역할을 수행하였다.
구조로봇은 무너진 건물이나 지진 후와 같이 실제 상황에서도 지속적으로 사용된다. 위험한 균열사이에서 먼지와 독가스 그리고 파편더미 속에서 살아있는 생존자들을 수색할 수 있다.이러한 구조로봇은 위험한 물질이 있는 사고지역이나 지뢰수색 및 부비트랩을 해체하는 현장을 비롯하여 예측불허의 미래 재난 현장에서 그 사용이 더욱 증가할 것이다.

구조로봇 ROBHAZ - Rescue
#6 대안함선 추진시스템은 ETH Zurich에서 어떻게 연구되고 있나?
‘나로(Naro)’ 프로젝트는 물고기처럼 자연스럽게 움직이는 수중로봇 개발과 관계가 있다. 이 프로젝트의 목표는 비효율적인 스크루 추진기를 대신할 수 있는 완전히 새로운 함선 추진시스템을 발견하는 데 있다.
참치의 정교한 이동 시스템
물고기는 수중 이동에 있어서 다양한 추진 개념을 발달시켰다. 참치는 훌륭한 내구성을 갖춘 상당히 빠른 해양생물이다. 최대 4미터의 몸집으로 시간당 최대 70km의 속도로 뻗어나간다. 참치의 이러한 놀라운 능력은 정교한 이동 시스템 덕분이다. 파동하는 몸의 움직임으로 추진력을 얻는 대부분의 어류와는 달리, 참지는 꼬리지느러미만을 이용하여 상당 부분의 추진력을 발생시킨다.
수중 로봇 ‘나로(Naro)
나로(Naro)는 물속에서 참치와 같은 형태의 움직임을 재현하게 된다. 로봇에게서 이러한 유동적인 움직임을 개발하기 위해서는 몸의 주축이 되는 6개의 단단한 요소로 나
눠야 한다. 이러한 요소들은 척추 뼈와 로봇의 외관형태를 형성하기 위해 결합한다. 특수 네오프렌은 내부에 물이 스며들지 않게 하고, 인공 물고기의 유선형태 유지를 가능케 한다.
수중 로봇과 맥슨 DC 모터
길이 95센티미터에 초당 1~2미터까지 이동하는 나로(Naro)는 5개의 직경 22mm 맥슨 BLDC 모터에 의해 앞으로 움직이게 된다.
이 모터는 초당 6번까지 방향을 바꾸면서 물고기의 움직임을 재현한다. 맥슨의 유성기어를 통해 회전속도는 감소하고, 토크는 증가된다. 한편, 방향의 전환은 흉근 지느러미와 꼬리의 다양한 편차에 의해서도 실현된다.
맥슨모터코리아 www.maxonmotor.co.kr
 Maxon EC-Powermax motor
Maxon EC-Powermax motor
B1N180V-QR20 / 사진. 터크 산업 자동화 전문기업 터크(Turck)가 경사 스위치와 IO-Link 마스터, 유량 센서, 유도형 링 센서, IIoT 플랫폼 등 산업 현장의 디지털화와 스마트 자동화를 지원하는 신제품 및 솔루션을 잇달아 공개했다. 이번에 선보인

사진. LS일렉트릭 LS일렉트릭이 차세대 IPC 기반 제어 플랫폼 ‘SU-CM70’을 공개하며 Software Defined Automation 시대를 겨냥한 자동화 플랫폼 전략을 본격화했다. SU-CM70은 초고속·다축 모션 제어와
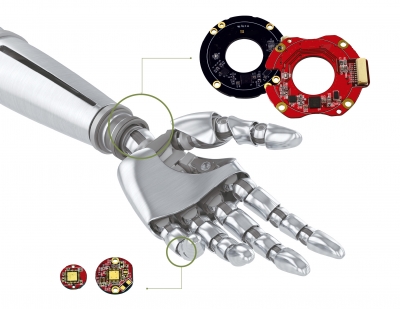
사진. 엔알티센서스 기존 엔코더 구조의 한계 개선 로봇 산업의 고도화와 함께 관절 단위의 정밀 제어 기술이 핵심 경쟁력으로 부상하며, 고해상도 엔코더에 대한 수요가 빠르게 증가하고 있다. 특히 휴머노이드 로봇에 대한 관심도 증가와 협동로봇의 확산으로 제한된 공간 내에서
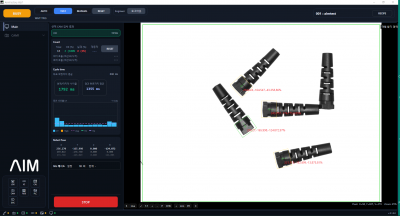
사진. 에이아이엠 자동화 솔루션 기업 에이아이엠(이하 AIM)이 로봇과 비전을 하나의 플랫폼으로 통합한 신규 소프트웨어 ‘AIMFactoryCore’를 앞세워 제조 자동화 시장 공략에 나선다. 기존 비전 중심 시스템에서 한 단계 확장된 구조를 통해


하비스탕스(주) 임승재 대표이사 / 사진. 하비스탕스(주) 하비스탕스(주)는 적층제조 기술을 기반으로 맞춤형 로봇 그리퍼 서비스 그립팜(GriPalm)을 제안하며 로봇 자동화 시장에서 경쟁력을 확대하고 있다. 동사는 씨메스로보틱스(주) 적용 사례를 통해 경량 EOAT(
생성형 AI와 휴머노이드가 산업계의 화두로 떠오르면서 제조 현장에서도 AI 활용 방안에 대한 관심이 높아지고 있다. 그러나 실제 공장에서는 화려한 기술보다 안정성과 생산성이 우선된다. (주)티로보틱스는 반도체 공정용 로봇으로 축적한 기술력을 기반으로 모바일 로봇과 피지






