
대한민국 로봇관련 특허분석
<자료제공 : 한국공작기계공업협회>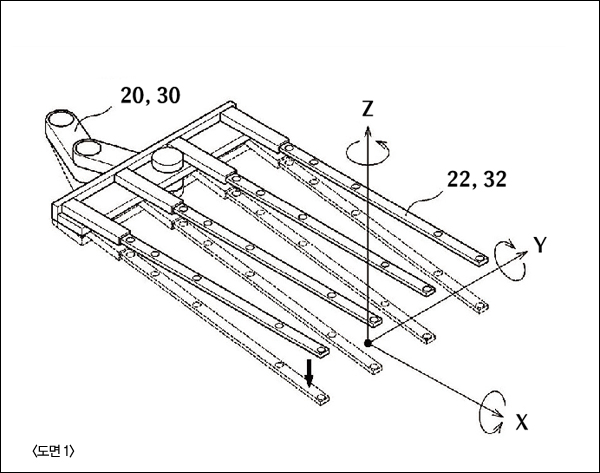
1 핸들링 로봇의 정적 처짐 보정방법 및 장치
대표도 : 20, 30 로봇 암 22, 32 엔드 이펙터, 40 제어기, 50 박판, 60 글래스- 출원번호 : 10-2005-0004327
- 출원일자 : 2005년 1월 17일
- 출원인 : 삼성전자(주)
- 발명자 : 조필주, 황재철
- 대리인 : 서봉석
* 심사청구 : 없음
■ 요약
본 발명은 핸들링 로봇의 정적 처짐 보정방법 및 장치에 관한 것으로, 대형 글래스를 핸들링하기 위한 엔드 이펙터의 동작시 엔드 이펙터의 자중 또는 엔드 이펙터에 걸리는 하중에 의해 발생되는 정적 처짐을 최적으로 보정하는데 그 목적이 있다.
이를 위해 핸들링 로봇의 정적 처짐을 보정하는 방법에 있어서 글래스 핸들링을 위한 로봇 암의 관절부에 보상부재를 삽입하여 엔드 이펙터의 처짐 각도를 보정하는 제1단계와 엔드 이펙터의 글래스 이송시 자중에 의해 발생되는 정적 처짐을 실시간으로 보정하는 제2단계로 구성된 것이다.
■ 고안이 속하는 기술
핸들링 로봇의 정적 처짐 보정방법 및 장치에 관한 이 발명은 특히 대형 글래스를 핸들링하기 위한 엔드 이펙터의 동작시 엔드 이펙터의 자중 또는 엔드 이펙터에 걸리는 하중에 의해 발생되는 정적 처짐을 최적으로 보정하는 방법을 이야기한다.
로봇은 여러 산업분야에서 다양한 목적으로 이용되고 있는데, LCD, PDP 등 FPD 산업 분야에서 글래스를 핸들링하기 위해 로봇을 이용하는 것을 예로 들 수 있다.
글래스는 글래스 버퍼(Glass Buffer)라고 불리는 카세트에 적재된 상태로 생산라인의 각 작업영역에 배송되는데, 생산라인의 일부 단위 공정에서 글래스 버퍼에 적재된 글래스를 꺼내어 해당 공정의 처리과정을 거친 후 다시 글래스 버퍼에 적재하기 위해 핸들링 로봇이 사용된다.
최근 FPD 산업의 급격한 수요증대에 발맞추어 생산의 기본단위인 원판 글래스(Mother Glass) 크기가 커지는 방향으로 생산성 향상을 도모하고 있으며, 이러한 글래스를 핸들링하는 로봇도 대형화됨에 따라 로봇의 성능이 생산성을 크게 좌우하고 있는 실정이다.
이러한 핸들링 로봇의 특성상 대형 글래스를 핸들링하기 위해 엔드 이펙터(핸드)가 앞으로 뻗는 동작에 있어서 엔드 이펙터의 자중 또는 엔드 이펙터에 걸리는 하중에 의해 큰 정적오차를 발생하게 되므로 이를 최소화하지 않으면 글래스 적재공간이 늘어남은 물론, 핸들링 중 글래스 이탈 또는 경우에 따라 장비에 투입조차 할 수 없게 되어 제조현장에 사용될 수 없다는 문제점이 있었다. 바로 이점을 해결하기 위해 로봇의 정적 처짐을 보정하기 위한 방법이 ‘대한민국 등록특허공보 0301231호’에서 제안되었다.
동 공보에서 제안된 보정방법은 대상물체의 위치보정을 위해 로봇 끝단에 부착된 레이저센서를 이용하여 기준 가공 대상체와 현재 가공 대상체의 기준점을 측정하여 물체 좌표계를 설정한 후, 두 좌표계 사이의 변형량을 기준으로 로봇의 작업경로를 자동으로 보정하는 것이었다.
이외에도 글래스용 핸들링 로봇은 아니지만 대형 로봇의 정적 처짐을 보정하기 위한 방법으로는 외부에 레이저 측정장치(1)를 설치하여 로봇의 엔드 이펙터(3; End Effector) 위치를 실시간으로 측정함으로써 이를 제어적으로 보정하는 방법과 로봇 암(5)의 기준점에 틸팅구조(7; Tilting Mechanism)라 불리는 모터를 설치하여 엔드 이펙터(3)의 정적 처짐을 보정하는 방법이 있다.
그런데 이와 같은 종래의 정적 처짐 보정방법은 글래스 핸들링 로봇의 특성상 작업현장에 레이저와 같은 측정장치(1)를 설치할 수 없으며, 레이저 측정장치(1)로 엔드 이펙터(3)의 정적 처짐을 보정한다 하더라도 일반 글래스 핸들링 로봇은 틸팅구조(7)가 없으므로 처짐 각도는 보정할 수 없다.
또한, 틸팅구조(7)를 설치한다 하더라도 특정방향(구체적으로는 X방향)으로의 처짐 각도는 보정할 수 없고, 추가적인 틸팅구조(7) 설치를 위한 모터 등의 추가비용과 레이저 측정장치(1) 및 이의 실시간 처리를 위한 장치에 고가의 추가비용이 발생한다는 문제점이 있었다.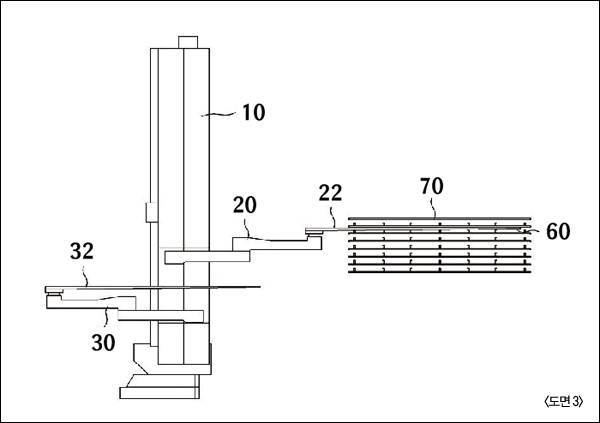
■ 기술적 과제
따라서 본 발명은 상기와 같은 종래의 문제점을 해결하기 위한 것으로, 그 목적은 로봇 암의 각 관절부에 박판을 삽입하여 관절이 수평면보다 위로 향하도록 조립하는 간단한 기구 보정으로 엔드 이펙터의 처짐 각도를 최소화하는 핸들링 로봇의 정적 처짐 보정방법 및 장치를 제공하는데 있다.
그리고 또 다른 목적은 엔드 이펙터의 수직방향 정적 처짐에 대한 실시간 보상제어로 핸들링 로봇의 정적오차를 최적으로 보정하는 핸들링 로봇의 정적 처짐 보정방법 및 장치를 제공하는데 있다.
■ 발명의 효과
앞서 설명에서와 같이 본 발명에 의한 핸들링 로봇의 정적 처짐 보정방법 및 장치에 의하면 로봇 암의 각 관절부에 박판을 삽입하여 관절이 수평면보다 위로 향하도록 조립하는 간단한 기구 보정으로 엔드 이펙터의 처짐각도를 최소화하고, 레이저 등의 외부 측정장치 및 틸팅구조 없이 엔드 이펙터의 수직방향 정적 처짐에 대한 실시간 보상제어로 핸들링 로봇의 정적오차를 최적으로 보정할 수 있다.







