
AGV 기반 제조 물류 현장에서 최근 전 방향 구동이 가능한 AGV 플랫폼의 수요가 지속적으로 높아지고 있다. 이에 자율주행로봇 구동 시스템 분야 전문 기업 (주)모터114 기술연구소의 전용철 상무는 현장에서 왜 전 방향 구동형 AGV를 요구하는지, 시장의 니즈에 부합되는 적합한 구동 솔루션은 무엇인지에 대해 전달한다.
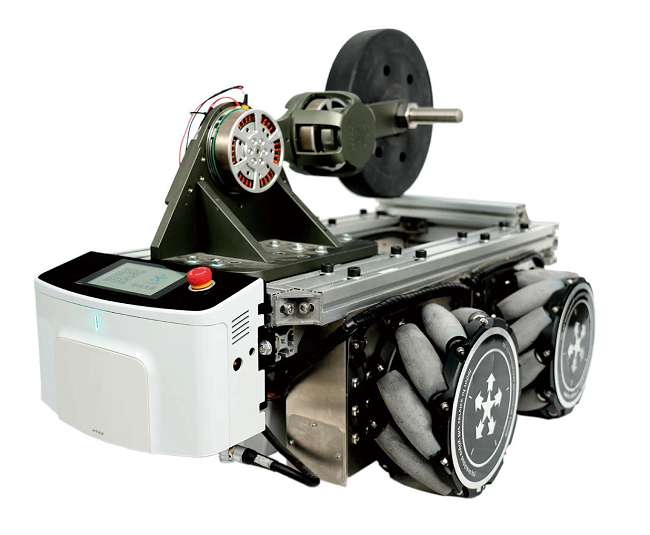
메카넘 휠을 적용한 자율주행 플랫폼(사진. 모터114)
1. AGV 물류 분야의 화두 ‘메카넘 휠’
일반적으로 공장 내에서 대차의 주행 및 작업 공간이 협소한 경우가 많기 때문에 최근에는 제한된 공간에서 최대의 작업 효율성을 확보할 수 있는 AGV 차량이 요구된다. 즉, 유도선(Guidance line)에 제한받지 않고 최소한의 회전 반경으로 전 방향 이동이 가능한 메카넘 휠(Mecanum Wheel) 구동형 AGV에 대한 수요가 높아지고 있다.
메카넘 휠 구동형 AGV는 차량의 회전반경을 최소화함으로써 불필요한 주행(후진 등) 없이 물류 운반 시간을 단축하고, 주행 라인을 최소화해 최적의 공정 효율성을 구현할 수 있다.
또한 전-방향 구동이 가능한 메카넘 휠은 기존의 휠 조향(Steering) 시스템보다 구성이 단순하고 좁은 공간에서도 자유롭고 유연한 이동이 가능해, 직각 및 사선주행 등 이동에 관한 높은 자유도를 가지므로 다양한 산업 분야에 적용되고 있다.

다양한 사이즈의 메카넘 휠(사진. 모터114)
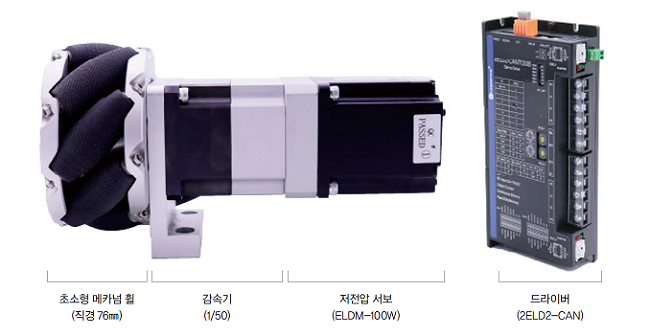
한편 기존의 메카넘 흴은 저속/고토크를 구현하기 위해 외부에 유성감속기와 BLDC모터를 장착해야 하므로, 기구 설계 시 공간에 대한 제약을 많이 받는다. 따라서 본문에서는 이를 해결할 솔루션으로 메카넘 휠과 모터, 엔코더 및 전자 감속기가 일체형으로 구성된 저속/고토크용 신제품 메카넘 휠 인 서보모터(Mecanum Wheel In Servo Moto)를 별도로 소개한다.
| 메카넘 휠의 주요 특징 및 장점 - 조향장치 없이 좌우 이동 및 회전이 가능해 효율적인 구조 및 비용 실현 - 주행 반경이 작아 공간 활용 및 기동성 우수 - 공정 간 운반 및 이적재 시간을 효율적으로 단축 - AGV 플랫폼 내 부품 수 최소화로 부피 및 중량, 비용 등 절감 |
2. 메카넘 휠의 역사와 구조 및 작동 원리
전방향 구동 휠은 사용 목적에 따라 여러 가지 형태로 개발되고 있는데, 최초의 옴니 휠(Omni-Wheel)은 1919년 미국의 J. Grabowiecki에 의해 만들어졌다. 이는 휠 둘레를 따라 자유롭게 회전시킬 수 있는 작은 롤러들을 배열한 형태인데, 휠 축과 롤러의 축이 수직이 되도록 배열한 것이 특징이다. 옴니 휠은 좌우 휠의 모터 회전 방향을 다르게 하면 조향장치 없이도 좌우, 직선 이동이 가능하다. 하지만 옴니 휠은 차량 진행 방향 및 수직 방향의 두 축에 대해서만 이동 가능하다는 단점이 있다.
기존 옴니 휠의 단점을 보완한 메카넘 휠은 현재까지 가장 활발하게 연구되고 있으며, 메카넘 휠을 장착해 전 방향으로 이동할 수 있는 차량을 ‘메카넘 구동형 전 방향 시스템’이라 일컫는다.
메카넘 휠은 1973년 스웨덴의 메카넘(Mecanum AB)사에서 개발했다. 이후 미국으로 특허권이 양도된 뒤 미 해군 항공기의 정비창에서 좁고 복잡한 공간에 사용할 목적으로 정비용 대차에 적용됐다.
메카넘 휠의 주요 특징으로, 타이어리스 휠(Tireless Wheel)을 기반으로 림(Rim)의 외부에 약 45° 각도의 작은 롤러 휠들을 장착한 구조를 지니고 있으며, 각각의 메카넘 휠들은 스티어링 장치가 없는 파워트레인 역할을 한다. 롤러의 개수나 재질에 따라 효율, 가격, 성능 등이 차이가 있으며 휠의 위치와 구조에 따라 실내용과 실외용으로 구분 제작된다.
롤러의 축은 휠의 축과 일정한 각도(대체로 45˚)로 배열되는데, 한두 개의 롤러만 지면과 접촉되며 모터의 회전에 따라 휠의 각속도가 변경된다.
롤러와 휠의 회전축은 수직이 아니기 때문에 주행 시 슬립이 발생하는데, 지면과의 마찰에서 각 롤러는 자유로이 회전하므로 롤러 축에 수직인 방향으로는 힘 벡터가 발생하지 않고 지면에 맞닿은 롤러의 축 방향으로 속도벡터가 생성된다.
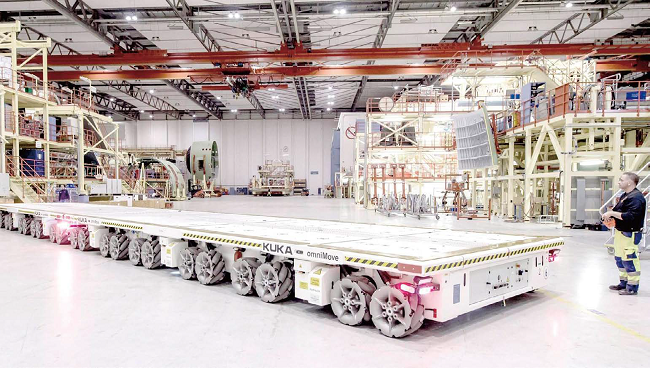
독일 함부르크 소재에 위치한 에어버스(Airbus) 제조 현장에서는 쿠카의 옴니무브(OmniMove)는 무게 90톤, 길이 15m에 달하는 거대한 A380 동체를 좁은 공간에서 유연하게 이송한다. (사진. KUKA)
3. 산업용 매카넘 휠의 품질 조건
메카넘 휠을 물류 운반용 AGV 구동용으로 사용하려면 메카넘 휠의 설계상 구조를 이해해야 한다. 일반적인 AGV 구동용 휠은 연속적인 면 또는 선의 형태로 지면에 접촉해 구동하나, 메카넘 휠은 구동 시 지면과의 불연속 점 접촉이 이뤄진다. 이에 따라 메카넘 휠의 회전동력이 지면과 접촉 시 슬립(Slip)이 발생해 구동력 손실이 발생하는 구조로서, 주행 시 불규칙한 바닥면 상태에 따라 구동 성능이 저하될 수 있다. 따라서 휠이 지면과 연속적으로 접촉해 슬립이 일어나지 않도록 메카넘 휠을 설계해야 하고, 롤러의 설치 각도와 형태 등에 의해 주행 능력이 결정되므로 설계뿐만 아니라 생산방식 자체가 복잡하기 때문에 AGV에 적용할 경우 기술력과 신뢰성이 검증된 제품을 사용해야 한다.
매카넘 휠의 내구성은 롤러의 재질과 베어링의 강도에 따라 결정되는데, 산업용으로는 CPU(Casting Poly Urethane)재질을 사용해야 한다. 또한 Vehicle Weight and Load, Vehicle Speed 등을 주행 패턴과 함께 고려해야 하고, 특히 서스펜션 구조는 충격 흡수를 위해 반드시 필요하며, 선택 시 치밀한 계산과 설치 후 조정이 필요하다.
|
매카넘 휠 적용 트렌드 |
4. 일체형 메카넘 휠 인 서보모터(모터/센서 내장형)
아래는 ZLTECH社의 7인치 200W 메카넘 휠 인 모터를 AGV 플랫폼에 장착한 모습이다. ZLTECH社의 메카넘 휠 인 모터는 구동부 조합(휠+모터+전자감속기+엔코더)이 일체형으로, 기존의 구동시스템에 비해 사이즈와 부품 수가 경량화 및 단순화됨으로써, 설치가 용이해 AGV 플랫폼 개발 시간을 단축할 수 있다.

ZLTECH社 메카넘 휠 인 모터가 적용된 AGV 플랫폼(사진. 모터114)

메카넘 휠 인 모터와 일반적인 모터/감속기 결합형 메카넘 휠 구동시스템의 비교(자료. 모터114)
메카넘 휠 솔루션별 비교
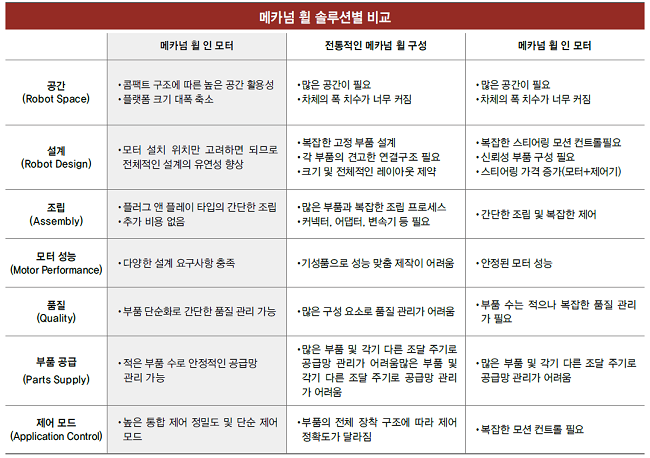
자료. 모터114

메카넘 휠 인 모터와 서스펜션 종류별 사진(사진. 모터114)
메카넘 휠 구동 시스템의 정밀한 방향 제어를 위해서는, 수직축 방향 이동 및 좌우 회전 시에는 기존의 AGV 듀얼 모터 제어시스템과 동일한 알고리즘으로 모터 구동을 제어하고, 수평축 방향 이동 및 사선 방향의 주행과 같은 복합 주행의 경우에는 1개의 자유도(Degree of Freedom)를 추가해 전후좌우, 제자리 회전(Spin-Turn) 등이 가능하도록 구현할 수 있다.
AGV의 전 방향 구동 제어는 각 휠들의 회전 방향의 조합을 통해 가능한데, 이를 위해서는 휠들의 회전 방향을 각각 다르게 제어해야 하므로, 메카넘 휠을 구동시키는 모터의 개수는 휠의 개수와 동일해야 한다.
주행 중 구동 휠이 축에 수직인 속도벡터를 가지는 데 비해, 메카넘 휠은 사선 방향의 속도벡터를 가진다. 이러한 메카넘 휠의 특성을 이용해 다양한 형태로 AGV 플랫폼에 메카넘 구동 휠을 설치한다. 휠에서 발생하는 속도 벡터들의 총합은 서로 상쇄되며 AGV의 진행 방향을 결정한다.
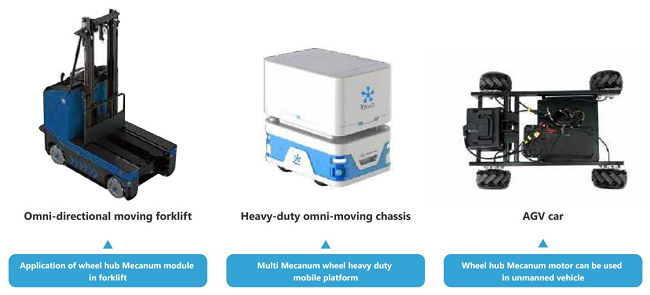
매카넘 휠 인 모터 애플리케이션(사진. 모터114)
중대형 메카넘 휠 사이즈별 적재 하중
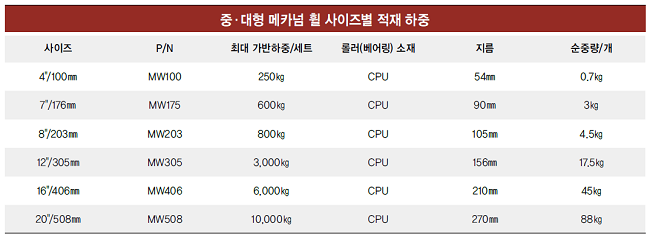
*재질 Aluminum Alloy Wheel & CPU(Casting PU)(자료. 모터114)
저상형 AGV용으로 맞춤 개발된 소형 매카넘 휠 제원
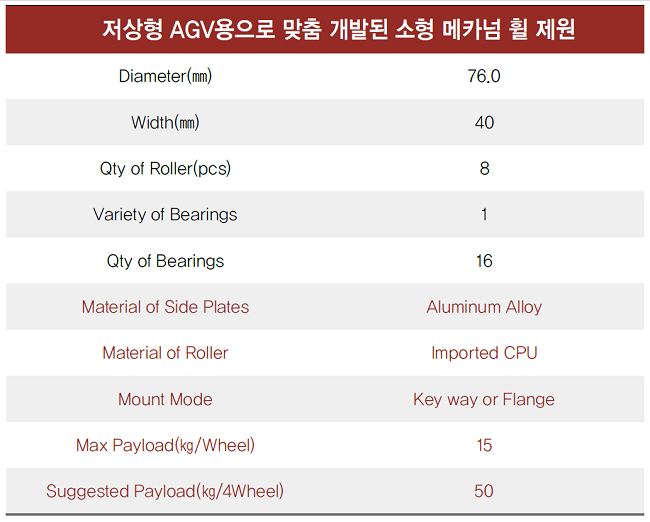
자료. 모터114
저상형 AGV용으로 개발된 초소형 매카넘 휠 구조
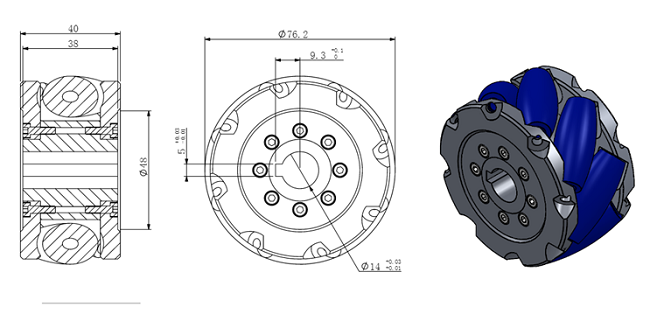
자료. 모터114
[참고 문헌]
위키피디아 사전
로보시티 기술자료
ZLTECH 기술자료
필자소개

(주)모터114 기술연구소 전용철 상무







