
한국생산기술연구원 조정산 박사(사진. KITECH)
| 한국생산기술연구원 유압로봇실험실을 운영하고 있는 조정산 박사는 1995년 대학생 시절 미로를 찾는 마이크로 마우스 로봇을 만들기 시작하면서 로봇과 인연을 맺었다. 대학원에 진학한 그는 축구하는 휴머노이드를 연구했고, 현재는 4족 보행로봇 ‘진풍’과 재난대응로봇 등 위험으로부터 생명을 보호할 수 있는 로봇을 개발하기 위해 다양한 연구를 진행 중이다. |
Q. 한국생산기술연구원(KITECH, 이하 연구원)에서 4족 보행로봇을 개발하게 된 배경은 무엇인가.
A. 미군에서는 바퀴나 궤도 형태의 지상무인체계가 지닌 이동성의 한계를 4족 보행로봇으로 해결하고자 빅독(Big Dog)을 개발했다. 우리 군에서도 지난 2006년 미국에서 개발한 빅독처럼 국방 분야에서 활용하기 위한 다족형 견마로봇 프로젝트를 기획했고, 본 연구원이 해당 프로젝트를 수행하면서 관련 연구가 시작됐다.
|
빅독(Big Dog)이란?
|

Q. 4족 보행로봇 개발에 있어 고려돼야 할 기술들은 무엇인가.
A. 여느 로봇과 다름없이 하드웨어와 소프트웨어, 시스템 통합으로 구분된다.
하드웨어 측면에서는 잘 걷기 위한 다리와 몸체 설계, 그리고 보행에 적합한 액추에이터 설계 및 야지에서도 자립형으로 운용하기 위한 동력원(배터리 등) 관련 기술이 요구되고, 소프트웨어의 경우 잘 움직일 수 있는 운동 능력(보행과 균형유지)을 위한 제어 알고리즘과 시각을 통해 환경을 인식하고 어디로, 어떻게 걸을지 생각할 수 있는 환경 인식 기반 이동지능기술이 필요하다.
한편 4족 보행로봇에 있어 시스템 통합(SI)은 매우 중요한 기술이다. 제어 시스템, 통신 시스템 등은 기존 로봇과 유사하더라도 그 무게와 부피를 자신의 다리로 버텨야 하는 자립형이기 때문에 소형, 경량화, 최적화가 필수적이다. 실제로 볼트 무게 하나까지 따져가며 설계를 하는데, 실제 동물의 몸처럼 쓸데없는 요소를 철저히 배제해 시스템을 설계하고, 통합해야 한다.
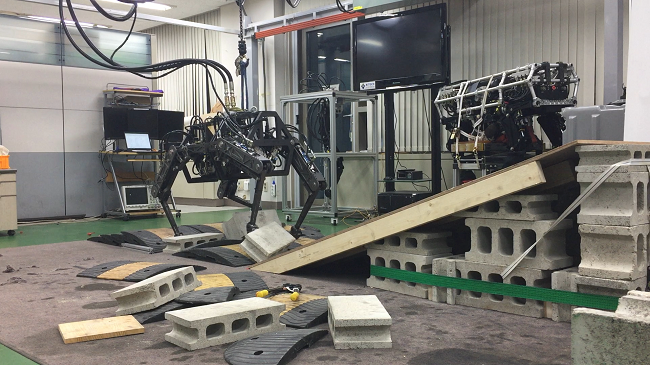
시멘트 블록 장애물이 있는 35° 경사 길을 오르는 진풍2 (사진. KITECH)
Q. 연구원에서 보유하고 있는 4족 보행로봇 관련 기술들에는 어떤 것들이 있나.
A. 앞서 언급했던 바와 같이 4족 보행로봇은 시스템 통합이 매우 중요하기 때문에 어떤 하나의 기술을 보유한다고 해서 관련 연구를 진행하기가 어렵다. 또한 하드웨어 설계나 제어 알고리즘도 철학적으로 연관성 있게 진행돼야 한다.
연구원에서는 국방이나 재난환경에서 큰 힘을 낼 수 있는 유압 기반의 대형 4족 보행로봇을 개발하고 있다. 이를 위해 생체모방형 유압 액추에이터와 이를 활용한 다리 설계 기술, 불규칙한 지면을 보행하기 위한 발 설계 기술과 자세 및 보행제어 알고리즘, 유압 동력원 기술, 제어 시스템 설계 기술과 함께 4족 보행로봇 시스템을 설계하고 통합하는 기술을 가지고 있다.
현재는 군에서 병사의 안전을 위험으로부터 조금이나마 떨어뜨리기 위해 국방용 4족 보행로봇을 개발하고 있다. 이는 산악, 붕괴지 등 불규칙 지형에서의 이동성(모빌리티)을 확보하기 위한 로봇으로, 국방 분야뿐만 아니라, 재난, 건설, 농업/임업, 야지 물류 등 다양한 분야에 활용될 수 있을 것으로 생각한다.
|
한국생산기술연구원이 개발한 4족 보행로봇 ‘진풍’
진풍2(사진. KITECH)
|
Q. 국내 4족 보행로봇 연구 수준은 선진국 대비 어느 정도 수준이라고 생각하나.
A. 미국 보스턴다이나믹스의 기술은 40년 이상 미군(DARPA)에서 꾸준히 지원한 프로젝트로, 소위 ‘넘사벽’이라고 표현할 정도로 비교하기 힘든 수준이다. 다만 제품을 떠나 기술적인 측면에서만 살펴보면 국내 기술 또한 선진국 수준에 근접한 것으로 생각한다. 미국이나 유럽에서도 아직 해결하지 못한 4족 보행로봇 기술들이 있는데, 이러한 부분들을 해결한다면 우리가 이 분야의 선진국이 될 수 있을 것으로 생각한다.

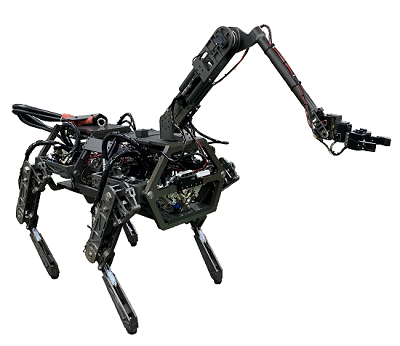
매니퓰레이터를 탑재해 문을 열고 밸브를 잠그는 진풍2(사진. KITECH)
Q. 4족 보행로봇과 관련해 앞으로의 기술 발전 방향 또는 트렌드를 전망하자면.
A. 크게 세 가지 정도를 이야기할 수 있다.
첫 번째는 하드웨어의 안정성이다. 실내가 아닌 야지에서 운용되기 위해서는 액추에이터, 다리, 동력원 등이 안정적으로 동작해야 한다. 소형, 경량화, 최적화와 함께 내구성과 신뢰성도 보장할 수 있는 설계 기술이 필요하다.
두 번째는 이동지능 기술이다. 보행 및 자세 제어는 어느 정도 실제 동물의 움직임을 구현하는 수준까지 도달했다고 판단된다. 현재는 다양한 환경에서 이동하기 위해서는 시각을 이용해 환경을 인식하고, 어디에 발을 딛고 어떤 행동을 해야 되는지에 대해 판단할 수 있는 이동지능 기술에 대해 보스턴다이나믹스와 스위스 취리히연방공과대학(ETH Zürich)에서 연구하고 있다.
세 번째는 운용개념(Behavior) 입장에서 어디에, 어떻게 쓸 것인가에 대해 고민해야 된다. 공장에서 사용하는 로봇들도 각각의 역할에 따라 그 형태나 제어 알고리즘이 달라진다. 4족 보행로봇 또한 이 같은 과정을 거쳐 활용 분야에 따라 필요한 기술을 개발해야 될 것이다.
Q. 국내 4족 보행로봇 연구와 관련해 연구원의 성과에 대해 소개하자면.
A. 연구원은 15년 이상 꾸준히 유압 기반 4족 보행로봇을 개발하고 있다. 2013년에 다족형 견마로봇 과제가 종료된 이후에는 견마로봇을 개발하면서 부족했던 요소기술 위주로 개발을 진행해왔다. 이 과정에서 미국 보스턴다이나믹스, 이탈리아공과대학(IIT, Istituto Italiano di Tecnologia) 등이 기존의 건설장비와 유사한 개념으로 4족 보행로봇을 개발하고 있는 반면, 우리 연구원은 동물의 근육을 모방한 형태의 새로운 개념으로 로봇을 설계하고 있다.
또한 4족 보행로봇의 이동 속도의 한계를 극복하기 위해 보행과 주행을 트랜스포밍할 수 있는 로봇도 개발하고 있다.
한편 세계적으로도 아직 완벽하지 않은 4족 보행로봇을 위한 새로운 시도를 지속적으로 수행하고 있는 것이야 말로 우리 연구원의 가장 큰 업적이라고 할 수 있다.
Q. 앞으로의 목표나 각오가 있다면.
A. 현재 군에서 사용할 400㎏이 넘는 중형 플랫폼 연구를 기획하고 있다. 국내에서 4족 보행로봇을 연구하는 거의 모든 연구진들이 참여하고 있는 프로젝트로, 우수한 국내 연구진이 참여하는 이 연구를 통해 세계적인 4족 보행로봇 기술을 개발할 계획이다.
또한 우리 연구팀은 ‘위험으로부터 생명을 보호할 수 있는 로봇 개발’이라는 목표 아래 전쟁이나 재난뿐만 아니라 건설, 농업 등의 위험 작업에 사람을 대신할 수 있는 세계 최고 수준의 로봇을 만들기 위해 최선을 다할 것이다.







