

지멘스 디지털 인더스트리 사업부가 주관하는 ‘Innovation Tour 2021 (이노베이션투어2021 )’이 지멘스가 제안하는 미래의 핵심산업을 주제로 9월 15일과 16일, 양일에 걸쳐 온라인으로 진행됐다.
본격적인 발표에 들어가기에 앞서 이번 행사의 진행을 맡은 한국지멘스 디지털 인더스트리 윤웅현 차장은 “최근 코로나 팬데믹과 함께 뉴노멀 시대를 맞이하는 급변하는 환경에 대응하기 위해 미래산업 기술의 중요성이 더욱 부각되고 있다.”고 말하고 “이번 행사는 지멘스가 제안하는 미래의 핵심 산업기술인 통합자동화와 인공지능, 자율주행 물류, 가상화를 주제로 디지털 엔터프라이즈 구축을 위한 최적의 솔루션과 국내외 적용사례를 통해 지멘스 고객사들에게 보다 실용적인 정보를 상세히 설명하고자 마련됐다.”고 밝혔다.
이번 행사에서는 작년까지 제시했던 2차 통합인 IT와 OT의 연계성을 넘어, 미래자동화에 적용 가능한 실증사례를 소개했다. 특히 버추얼 컨퍼런스로 진행된 이번 행사는 보다 시각적이면서 직관적으로 디지털화에 대한 체험을 할 수 있는 다양한 컨텐츠로 진행이 된 것이 특징이다. <최교식 기자 cks@engnews.co.kr>
프로세스산업과 공장자동화산업으로 나눠진 체험 존과 미래자동화 존을 경험할 수 있는 한국지멘스 디지털 인더스트리 KDEX센터에서 진행
이어 지멘스 디지털 인더스트리 이장섭 이사는 인사말을 통해, 자신이 서 있는 곳은 한국지멘스 디지털 인더스트리 KDEX센터로, 이곳은 지멘스가 제시하는 미래의 산업기술들을 인더스트리 및 디지털화를 위한 밸류체인에 맞춰서 경험해 볼 수 있는 고객중심의 장소가 될 것이라고 피력하고, 이 KDEX센터는 프로세스산업과 공장자동화산업으로 나눠진 체험 존을 기본으로 인공지능, 엣지컴퓨터 등의 미래 산업자동화 기술을 조명하는 미래자동화 존을 경험할 수 있다고 설명했다.
또 이번 이벤트는 산업자동화의 미래 트렌드를 함께 확인하고 지멘스의 솔루션을 제시하고자 마련이 됐으며, 올해 행사는 미래라는 테마로 준비가 됐다고 말하고, 어떤 디지털 트렌드가 산업계의 화두가 되어가고 있는지 설명했다. 다음은 이 이사의 설명이다.
기술의 발달, 환경적 요구, 고객의 요구 등 다양한 원인에 의해 매우 다양한 종류의 디지털 기술의 적용이 미래의 자동화기술로 요구가 되고 있다. 네트워크나 가상화와 같은 IT기술의 발달로 IT기기를 통한 모바일 워킹이나 AI 등의 기술이 산업현장에 적용되는 인더스트리 4.0 외에도 빠르고 편한 통합 자동화를 위한 제로 엔지니어링, 미래의 석유라고 일컬어지는 데이터로부터 새로운 부가가치를 창출하는 데이터 기반 비즈니스 모델 등의 트렌드 등이 미래기술과 융합되어 자동화에 빠른 속도로 스며들고 있다. 이런 미래기술 트렌드는 제조사가 얼마나 고객의 니즈를 파악하여 고객중심적인 생산을 할 수 있는가 하는 것이 생존의 핵심요소가 되고 있음을 보여주고 있다. 가상 혹은 증강현실과 같은 혁신적인 네트워크 응용은 소비자에게 강력한 정보습득의 이익을 제공한다. 따라서 고객은 자신이 원하는 제품을 누구보다 빠르게 개발할 수 있는 방법을 갖추어 가고 있고, 기업이 살아남기 위해서는 이런 고객맞춤의 생산기술을 빠른 시일 내에 갖추어야 하는 상황이 되어가고 있다.
TIA는 통합자동화라고 하는 지멘스의 핵심 플랫폼이며, 60년 동안 지멘스가 제공해온 SIMATIC 자동화 제어기기를 중심으로 미래자동화의 단서를 제공하고 있다. 단순한 통합자동화 엔지니어링 툴의 범위를 넘어서 미래자동화를 위한 도약의 게이트웨이로 성장하는 TIA 플랫폼은 지멘스의 자동화 솔루션의 핵심이라고 말할 수 있다.
TIA의 가치는 부분적으로 자동화기기들의 통합에서 출발한다. PLC, 모션, 세이프티, 네트워크 등의 산업 핵심요소들을 하나의 기반에서 통합하는 TIA Portaal은 통합자동화의 기술 이외에도 AI, 엣지컴퓨팅, 클라우드 등의 미래기술 도입에도 기본적인 관문이 된다. TIA 개념의 개발 초기의 당면한 과제는 자동화 자산과 소프트웨어, 그리고 서비스 영역의 통합이었다.
통합 1단계에서 모션, HMI, 세이프티, 네트워크 이외에도 진단을 포함한 서비스 영역까지를 폭넓게 유연한 UI에서 통합하는 것에 초점을 두었으며, 통합자동화 포탈이라는 소프트웨어 플랫폼의 개발을 통해 성공적인 결과를 만들어낼 수 있었다. 통합 2단계에서는 MES, CAD, 플랫폼 데이터베이스, 클라우드 등의 IT 기술과의 통합을 OPC UA, 프로피넷 기술들을 통해 이루어냈으며, 그 결과를 기반으로 디지털 산업을 위한 초석이 마련됐다.
우리가 쓰고 있는 통합 3단계에서는 AI, 엣지컴퓨팅, 5G와 같은 미래기술을 산업자동화에 통합하고자 하는 실증케이스를 만들어 가고 있다. 현재 예지보전, 로봇제어 등의 영역에서 PLC모듈형 AI를 이용한 실증기술 검토가 이루어지고 있고, 엣지컴퓨팅 또한 보안과 데이터 분석과 같은 스타트 데이터 영역에서 많은 실증케이스를 만들어 가고 있다. 현재는 매우 제한적인 사례에 대해 실증 시험 중이지만, 1~2년 후에는 빠르게 양산에 적용될 수 있을 것으로 본다.
IT와 OT의 연계성을 넘어, 미래자동화에 적용 가능한 실증사례 소개
이번 행사에서는 작년까지 제시했던 2차 통합의 IT와 OT의 연계성을 넘어, 미래자동화에 적용 가능한 실증사례를 소개했다.
스스로 결정하는 시스템인 인공지능은 그 자체로도 매력적인 시스템이지만, 통합 제어시스템과 만날 때 그 가치가 더욱 극대화된다. 지멘스에서는 PLC 모듈 사이즈의 TM NPU를 개발했으며, 데이터 처리 외에도 로봇제어나 외부 센서에 대한 판독 결정작업 등에 폭넓게 PLC가 직접 통합되어 실증사례를 만들어나가고 있다.
AGV 시스템은 이미 많은 분야에서 사용되고 있다. 지멘스에서는 독자적인 내비게이션 시스템과 통합자동화 및 진단 기능으로 더 유연하고 쉬운 AGV 솔루션을 제공한다.
엣지컴퓨팅은 데이터의 스마트한 이용으로 또 다른 부가가치를 만들어 가고 있으며, 이러한 모든 기반이 되는 네트워크는 지멘스가 제공하는 보안솔루션을 바탕으로 더욱 공고해질 것이고, 그 바탕에서 자동화부터 에너지관리에 이르기까지 폭넓은 기술이 통합될 것이다.
미래의 산업자동화 혁명은 특정 기술의 발전이 아닌 다수의 IT 및 OT 기술의 유기적인 결합의 형태로 나타나게 될 것이다. 각사마다 얼마나 생산현장에 알맞은 미래기술을 선택하고, 자동제어시스템과의 연결을 어떻게 이루어낼 것인가 하는 것이 관건이 될 것이며, 그 과정에서 일찍 준비된 기업은 성장의 실마리를 잡을 수 있을 것이다.
Ⅰ. 통합자동화와 로봇 그리고 인공지능- 윤웅현 차장
첫 번째 세션은 PLC 모듈 베이스 인공지능과 로보틱스를 주제로 한국지멘스 윤웅현 차장이 발표를 진행했다. 이번 세션에서는 TIA 통합자동화에서 업데이트되어가고 있는 주요 자동화 요소 중의 세 가지와 로보틱스(Robotic)에 대한 설명이 진행됐다.
통합자동화와 로봇 그리고 인공지능은 일반적으로 따로 떨어뜨려서 생각하는 경우가 많은데, 실질적으로는 로봇과 인공지능은 밀접하게 관련이 되어있다.
지멘스의 TIA는 10년쯤 전부터 필드 디바이스와 HMI, 컨트롤 영역들을 통합하는 것에서 시작됐다. 그러나 현재는 이런 부분들을 넘어서 IT와 OT영역을 연결하는 부분, 그리고 클라우드나 엣지컴퓨팅, 그리고 인공지능과 같은 신기술을 미래기술로서 받아들이는 부분까지를 목표로 해서 진행이 되어가고 있다. TIA의 미래는 통합자동화와 시큐리티, 네트워크, 데이터 분석에 이르기까지 대단히 폭넓은 분야를 커버한다.
TIA Portal은 버전17까지 출시가 됐으며, 버전업이 되면서 많은 부분이 업데이트됐다.다음은 로보틱스와 인공지능에 관해 업데이트된 내용이다.
OPC UA 서버 및 클라이언트, 그 외에 파생되는 기능들을 PLC에 탑재
네트워크 통합 및 표준화, 그중에서도 OPC UA 표준 인터페이스에 대해 설명할 필요가 있다.
기존에 사용됐던 OPC와는 달리, OPC UA는 실시간성 통신이나 퍼포먼스, 진단영역에 대한 부분을 더욱 강화해서 인더스트리얼 영역에 맞게 새롭게 만들어진 프로토콜이다.
OPC UA가 추구하는 것은 연결성의 표준화다. 데이터 서버 그리고 데이터 클라이언트와의 연결, 즉 PLC와 상위 혹은 컨트롤러 간의 연결을 표준하하고, 밴더에 상관없이 모든 제품들이 단 하나의 표준 네트워크로 연결이 가능하도록 하는 것이 목적이다. 지멘스는 몇 년 전부터OPC UA 서버와 클라이언트를 PLC CPU 자체에 탑재하는 작업을 해왔고, 현재는 OPC UA 서버와 클라이언트 및 그 이외에 파생되는 기능들을 PLC에 탑재해놓은 상태다. 앞으로 OPC UA는 밴더에 상관없는 통신을 위한 표준프로토콜로 자동화에서 널리 사용될 것으로 예상된다.
두 번째는 E-CAD영역의 통합이다.
E-CAD는 Electric CAD의 약자로, 전기도면, 판넬을 도면화하는 시스템을 말한다. 기계적인 CAD처럼 E-CAD도 자동화 영역에서는 대단히 중요한 부분 중의 하나다. 그중에서도 많이 사용되는 EPLAN 같은 프로그램은 AML(Automation Markup Language)이라고 하는 표준 마크업 랭귀지를 지원하고 있다. TIA Portal 또는 TIA Selection Tool과 같은 지멘스 툴에서는 이러한 AML 플랫폼을 지원하기 때문에, E-CAD에서 만들어진 E-CAD 도면 혹은 TIA Portal에서 만들어진 하드웨어 설정 등을 익스포트하거나 임포트해서 서로 호환되게끔 하는 데이터 교환이 가능하다. 이런 부분들은 단순한 편의성을 넘어서 디지털 엔터프라이즈가 가져야 하는 유연성에 영향을 준다. 예를 들면 E-CAD 시스템에서 만들어진 전기도면을 자동화로 옮기기 위해서는 자동화 툴에서 별도로 수작업으로 만들어야 했다. 그런 과정에서 휴먼에러도 발생할 수 있기 때문에, 많은 시간이 소요가 됐다. 그리고 자동화를 거친 후에도 양산과정에서 특히나 전자 및 전기업계에서는 제품 자체의 라이프타임의 유연성이 대단히 크기 때문에 중간중간에 라인의 변화가 생기는 경우가 있다. 이런 경우에 E-CAD 시스템으로 다시 이 부분을 반영하기 위한 노력이 많이 필요하다. 또한 이 과정에서 사람의 실수 때문에 작은 에러가 발생하면 나중에 큰 영향을 미칠 수 있기 때문에, 이런 것들에 대한 데이터체인으로서의 AML이 중요한 요소 중의 하나가 된다.
세 번째는 이중화(가용성), 세이프티 부분이다.
고가용성이라는 어플리케이션은 플랜트의 유틸리티나 인프라스트럭처에서 주로 많이 사용한다. 터널, 매트로 같은 어플리케이션들은 정해진 시간 동안 절대 멈추면 안 되는 가용성을 필요로 한다. 그리고 특히 인프라스트럭처 어플리케이션에서는 가용성 외에도 안전에 대한 부분이 꼭 필요한 경우가 있다. 예를 들면 터널의 환기시스템이나 기상 대피시스템 같은 경우는 24시간 내내 가용해야 하고, 안전에 대한 요소가 고려돼야 한다. 이런 안전에 대한 부분, 고가용성에 대한 부분이 결합된 요소들은 앞으로 미래산업에서 꼭 필요한 요소들이다.
TIA : 자동화 플랫폼을 넘어선 미래를 위해 Robotics 추가
로보틱스는 디지털 인더스트리에서 대단히 중요한 역할을 하게 될 요소다. 로봇은 사람이 하기 힘든 요소, 위험한 일을 대신해 주는 요소로서도 각광 받고 있지만, 디지털 인더스트리의 한 구성요소로서도 각광을 받고 있다.
먼저 왜 로보틱스가 주목을 받고 있는지에 대해 시장 트렌드와 함께 설명이 됐다.
현재 지역별 산업용 로봇 판매대수를 보면, 아시아의 경우 2008년도 6만 대에서 현재 28만3천대까지 증가했다. 특히 아시아지역은 전기, 전자 및 여기에 수반되는 조립산업 같은 부분의 비중이 높기 때문에, 대단히 빠른 속도로 중국, 한국, 여타 아시아국가에서 로봇의 수요가 많이 늘어났다. 자동화 정도의 증가나 기술적인 혁명, 로봇 자체의 가격하락, 작아지는 디자인 등 여러 가지 요소들의 영향을 받아서 로봇 수요가 늘어나고 있기도 하지만, 디지털 팩토리를 구성하는 요소로서의 수요가 늘어나고 있다.
현재까지의 통합자동화 영역에서 로보틱스의 통합은 대단히 불편한 방법으로 이루어져 왔다. 로봇 메이커는 자체 로봇 컨트롤러를 가지고 있고, 자체 프로토콜로서 로봇을 제어하기 때문에 현재까지의 PLC는 로봇 컨트롤러와 네트워크로 연결하거나 하드와이어링으로 연결이 된 상태에서 IO 커맨드 형태로 밖에는 통신을 주고받지 못했다. 이런 부분에서 어려움이 필연적으로 발생할 수밖에 없다. 예를 들면 사용자가 여러 밴더의 로봇을 사용해야 하는 상황이 됐을 때, 제조사마다 다른 로봇 소프트웨어나 하드웨어를 핸들링하고 통합할 수 있어야 한다. 그리고 로봇 제조사 특유의 프로그램 등 노하우가 필요하고, 서로 다른 로봇에 대해 새로운 프로그램이 필요하기 때문에, 각각의 로봇 밴더마다 프로그래밍할 수 있는 엔지니어가 한 명씩 있어야 하는 경우도 발생한다. 그리고 이런 구현에 대한 문제뿐만 아니라 서비스나 보전에 대한 복잡성도 문제가 되어왔었다.
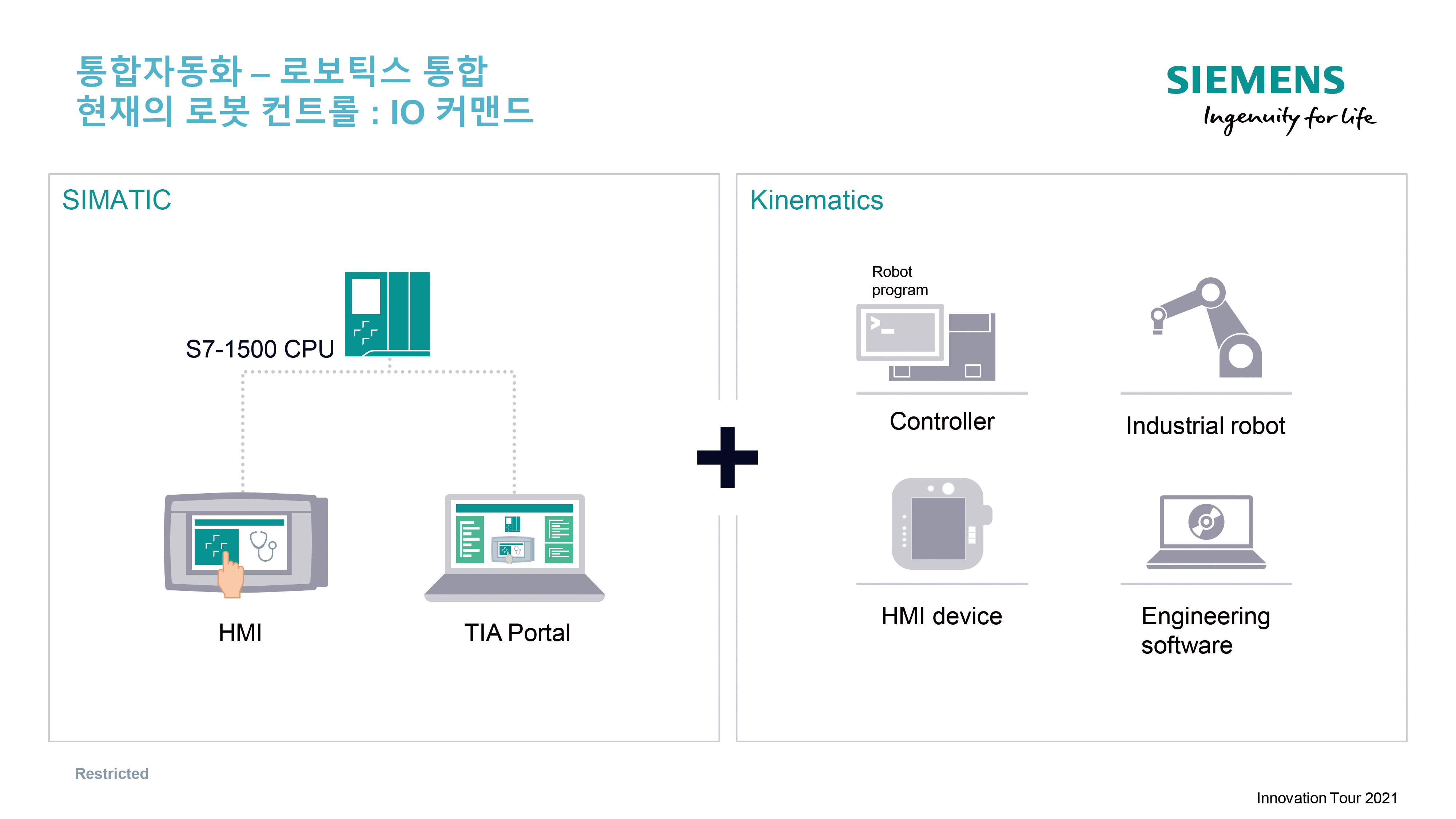
<그림1> TIA 통합자동화에서는 로보틱스를 통합한다.
지멘스는 로봇을 만드는 회사가 아니다. 따라서 이 부분을 해결하기 위해서 시마틱 로봇 라이브러리(SIMATIC Robot Library)라는 솔루션을 출시했다. 이를 통해 밴더가 서로 다른 로봇 들이 하나의 로봇 라이브러리에 합쳐져서 PLC에 있는 공통 프로그램으로 조작이 가능해졌다.
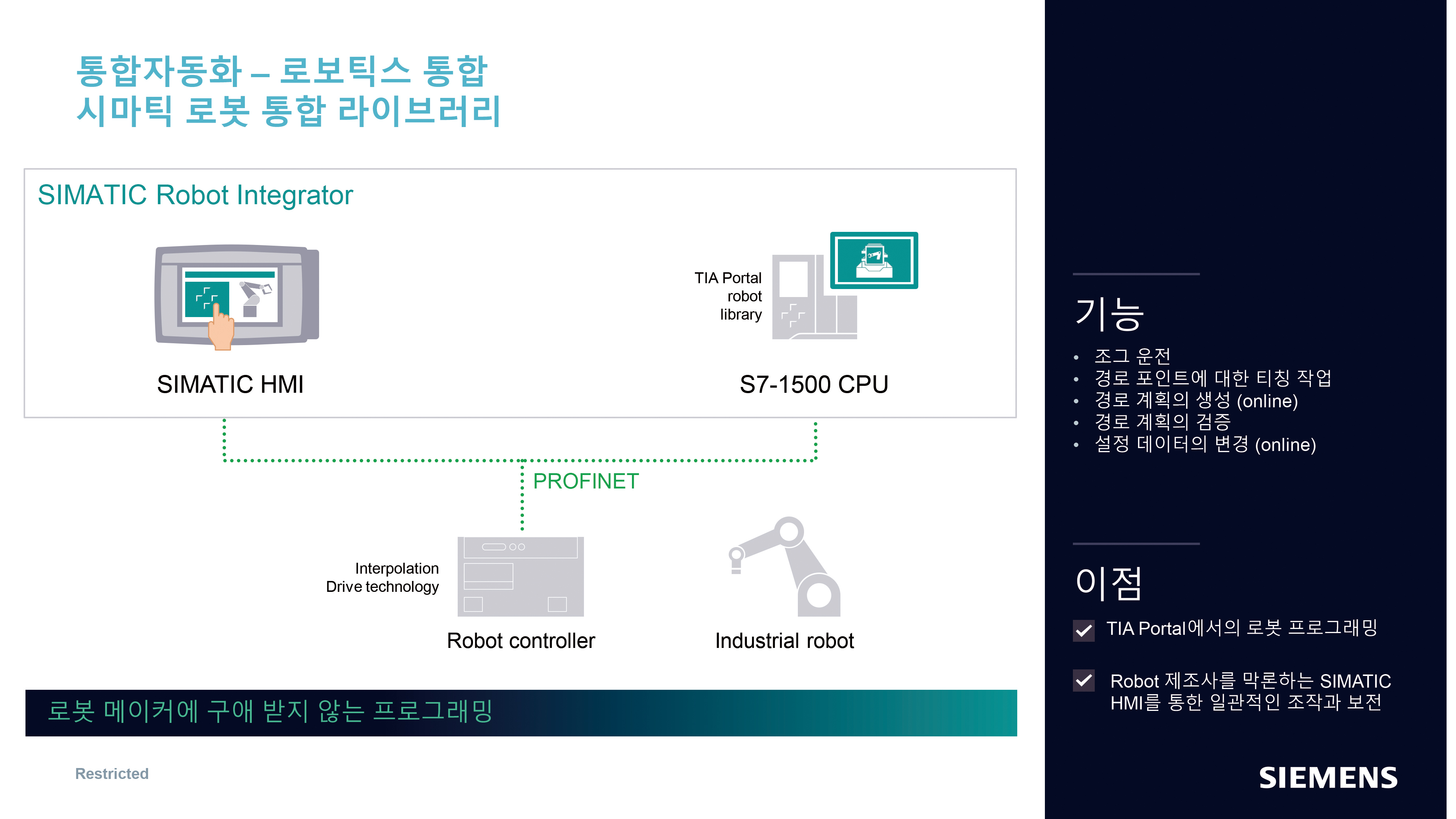
<그림2> SIMATIC Robot Library를 통해, 밴더가 서로 다른 로봇들이 하나의 로봇 라이브러리에 합쳐져서 PLC에 있는 공통 프로그램으로 조작이 가능해졌다.
통합자동화에서 얘기하는 로봇통합은 단순한 통신이나 IO 커뮤니케이션에 의한 로봇제어가 아니라 시마틱 로봇 라이브러리라고 하는 공통의 라이브러리 플랫폼에서 서로 다른 밴더들이 오픈된 플랫폼에 맞추어 인터프리터라고 하는 인터페이스를 제공하고, 프로그램을 CPU에 있는 PLC 프로그램과 통합해서 하나의 프로젝트로 관리하는 개념이다.
조그 운전이나 경로 포인트에 대한 티칭, 혹은 경로계획의 생성이나 이런 것들을 검증하는 작업들, 설정 데이터를 변경하는 작업들까지도 TIA Portal에서 가능하기 때문에, 각각의 로봇 밴더의 특성을 생각할 필요 없이 하나의 프로젝트로, 적은 엔지니어 인력으로 관리와 프로그램이 가능하다는 장점을 갖게 된다.
이번 세션에서는 로보틱스와 관련된 동영상이 소개됐다. 이 동영상은 로봇통합과 시뮬레이션은 독일에서, 장비의 실제 조립은 중국에서 이루어진 사례로, 통합된 로봇들을 실제로 커미셔닝하기 전에 가상공간에서 시운전을 해보는 과정을 보여주고 있다.
휴대폰은 수명주기가 대단히 짧기 때문에, 휴대폰 제작 장비를 만드는 회사들은 대단히 짧은 시간 사용 후에 장비의 변화가 일어나는 것을 염두에 두고 장비를 만들어야 한다. 즉, 디지털 팩토리에서 얘기하는 ‘유연성의 극대화’를 생각해야 한다. 따라서 일반적인 기구가 아닌 로봇을 사용하기로 했고, 그 과정에서 로봇은 SIMATIC Robot Library에 의해서 PLC의 원(One) 프로젝트로 통합이 되고, 가상 시운전을 위해서 시뮬레이션 소프트웨어에 이 통합된 로봇들을 집어넣고 실제로 커미셔닝하기 전에 가상공간에서 시운전을 해보는 과정이 소개가 됐다.
이 장비가 꼭 갖춰야 할 유연성을 로봇을 사용함으로써 쉽게 구현할 수 있었고, 가상 시운전을 통해 시뮬레이션해본 결과를 가지고 이 장비를 시운전해볼 수 있었기 때문에, 좀 더 빠른 시간 안에 안전하고 효율적으로 장비를 완성할 수 있었다. 그리고 이렇게 통합된 프로젝트들, 로봇, PLC 프로젝트가 통합된 프로젝트는 사용 중에 진단정보를 확인하는 부분이 용이하기 때문에, 보전에 필요한 시간을 단축해주는 역할을 한다. 이를 통해 유연성과 통합성을 두루 갖춘 조립장비가 탄생할 수 있었다.
로보틱스 통합 라이브러리에는 ABB와 COMAU, 엡슨, 화낙, 쿠카, 나치, 파나소닉, 스토브리, TM로봇, 유니버설로봇, 야마하, 야스카와 등 약 12개의 파트너사가 함께 프로젝틀 진행하고 있다.
SIMATIC Robot Library는 단순히 로봇통합을 위한 방법만은 아니다. 지멘스 추구하는 SIMATIC Robot Library의 최종 단계는 엣지컴퓨팅이나 인공지능, 시뮬레이션 등과 함께 통합될 수 있고, 이런 것들이 디지털팩토리의 초석이 될 것이다.
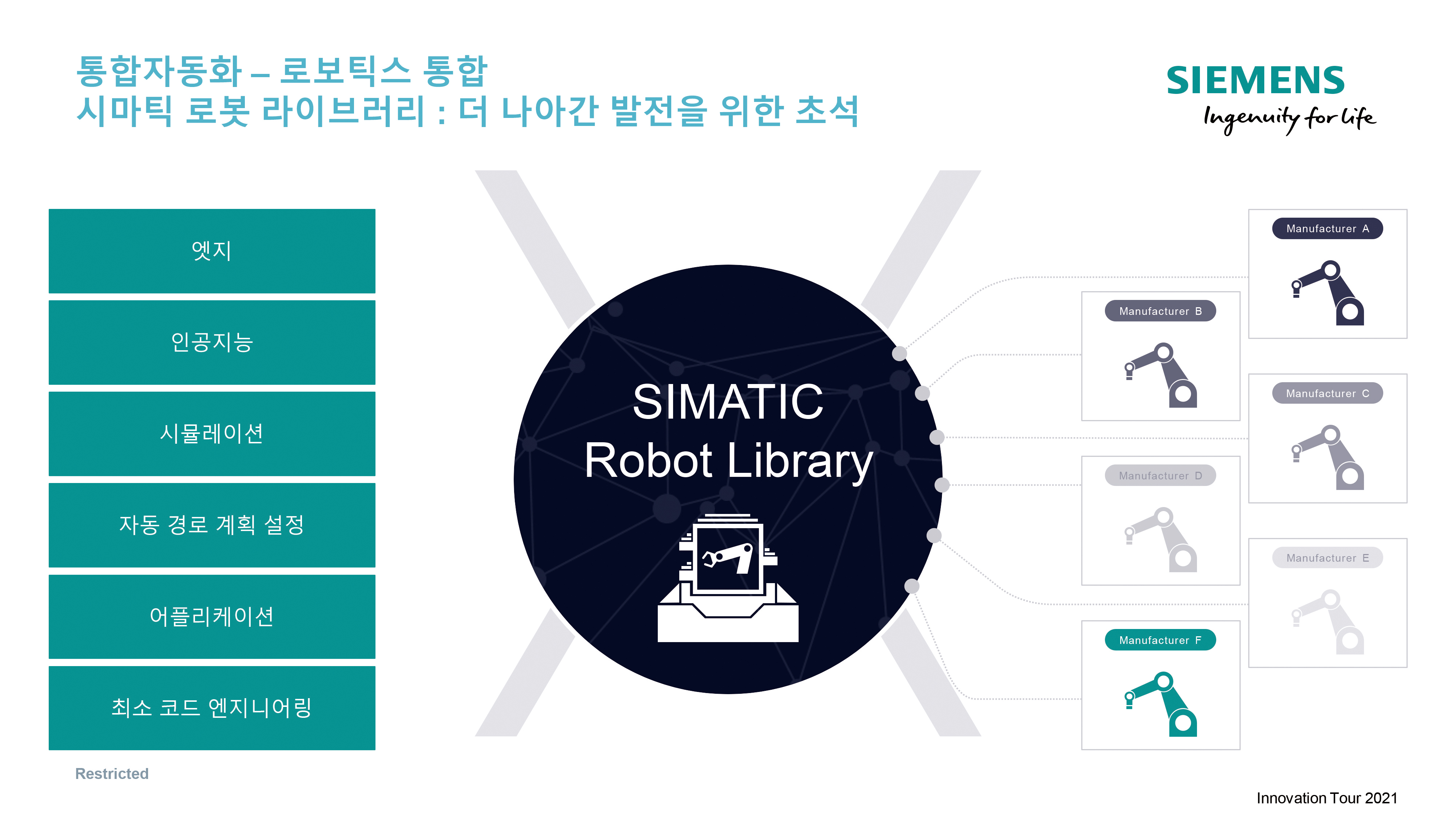
<그림3> 통합자동화 – 로보틱스 통합. SIMATIC Robot Library는 엣지컴퓨팅이나 인공지능, 시뮬레이션 등과 함께 통합되어 디지털 팩토리의 초석이 될 수 있다.
이처럼 SIMATIC Robot Library는 PLC와 로봇의 일관된 개발환경을 제공함으로써, 개발시간을 단축하고, 다수의 로봇 메이커의 생산현장 통합에 동일한 플랫폼의 사용이 가능하기 때문에 통합작업의 효율성을 올려주며, 로봇 메이커에 구애받지 않는 단일 플랫폼을 사용하기 때문에 문제가 발생했을 때 디버깅 시간을 단축시켜 준다. 그리고 제어 플랫폼 자체가 표준화되고 통합되기 때문에, 프로젝트의 복잡도가 간소화되고 진단이 용이해진다.
TIA에 인공지능(AI)을 통합
이어서 인공지능 통합에 대한 주제가 다루어졌다. TIA가 자동화 플랫폼을 넘어 미래를 위해 인공지능이 통합이 되는 내용이다.
윤 차장은 인공지능은 특정상황에서 학습에 의해 스스로 결정을 내리는 시스템이라고 설명했다.
지멘스는 인공지능에 많은 투자와 노력을 하고 있다. 현재 많은 실증검증단계를 거쳐 공식적인 릴리즈를 준비하고 있다. 산업현장에서 우리가 보는 인공지능은 대표적인 몇 가지 응용 케이스를 가지고 있다.
첫 번째는 시각품질 판정이다. 색상, 질감 분석 및 품질 판정 등에 대한 인간의 ‘전문 지식 및 노하우’를 학습을 통해 구현하는 것이다. 예를 들면 초콜릿 매스, 철강재 등의 제품의 색상을 검사해서 제대로 만들어져가고 있는지 본다거나 용광로의 불꽃 색깔을 감별해서 프로세스가 제대로 돌아가고 있는지 판단하는 부분들, 또는 로보틱스 영역에서 카메라로 작업대상물을 판독하고 유연하게 로봇 경로 설정을 최적화하는 부분들, 그리고 컨디션 모니터링이라고 하는 PLC 데이터를 기반으로 비정상 상태를 진동이나 소리를 통해서 검출하는 영역이 대표적인 응용 케이스다.
지멘스는 TM NPU라고 하는 인공지능 모듈에 마이크 혹은 카메라를 달아서 데이터를 판별하는 형태를 고려하고 있다.
인공지능을 사용하는 이유는 여러 가지가 있지만, 기본적으로 단순한 센서나 비전을 사용하는 것에 비해서 시각품질을 판정하는 부분에 있어서는 조명이나 외란에 강하다는 특징, 로보틱스 영역에서는 새로운 프로그램이나 복잡한 알고리즘을 새롭게 만들어야 하는 과정이 없다는 특징, 그리고 소리나 진동을 통해서 예지보전이 가능하다는 특징, 이렇게 3가지의 강점을 가지고 있다.
한 식음료 회사는 당근 과즙을 만드는 과정에서 이물질을 검출하는 데 큰 어려움을 겪고 있었다. 야채에 묻어있는 흙이나 돌 같은 이물질들은 주서에 들어갔을 때 장비의 고장을 초래할 수 있고, 고객이 마셨을 때 문제가 될 수 있다. 그래서 인력을 투입해서 이런 부분에 대한 작업을 하지만 효율이 높지 않다. 그래서 S7-1500 TM NPU라는 인공지능 모듈을 사용하여 학습된 신경망을 적용해 라인 상에서 이물질을 검출할 수 있었고, 돌과 같은 이물질이 검출되는 경우 즉시 퇴출된다. 그래서 고객은 이물질이 염려 없는 고품질의 주스를 만들 수 있었고, 번거로운 작업을 자동화할 수 있는 이점을 얻을 수 있었다.
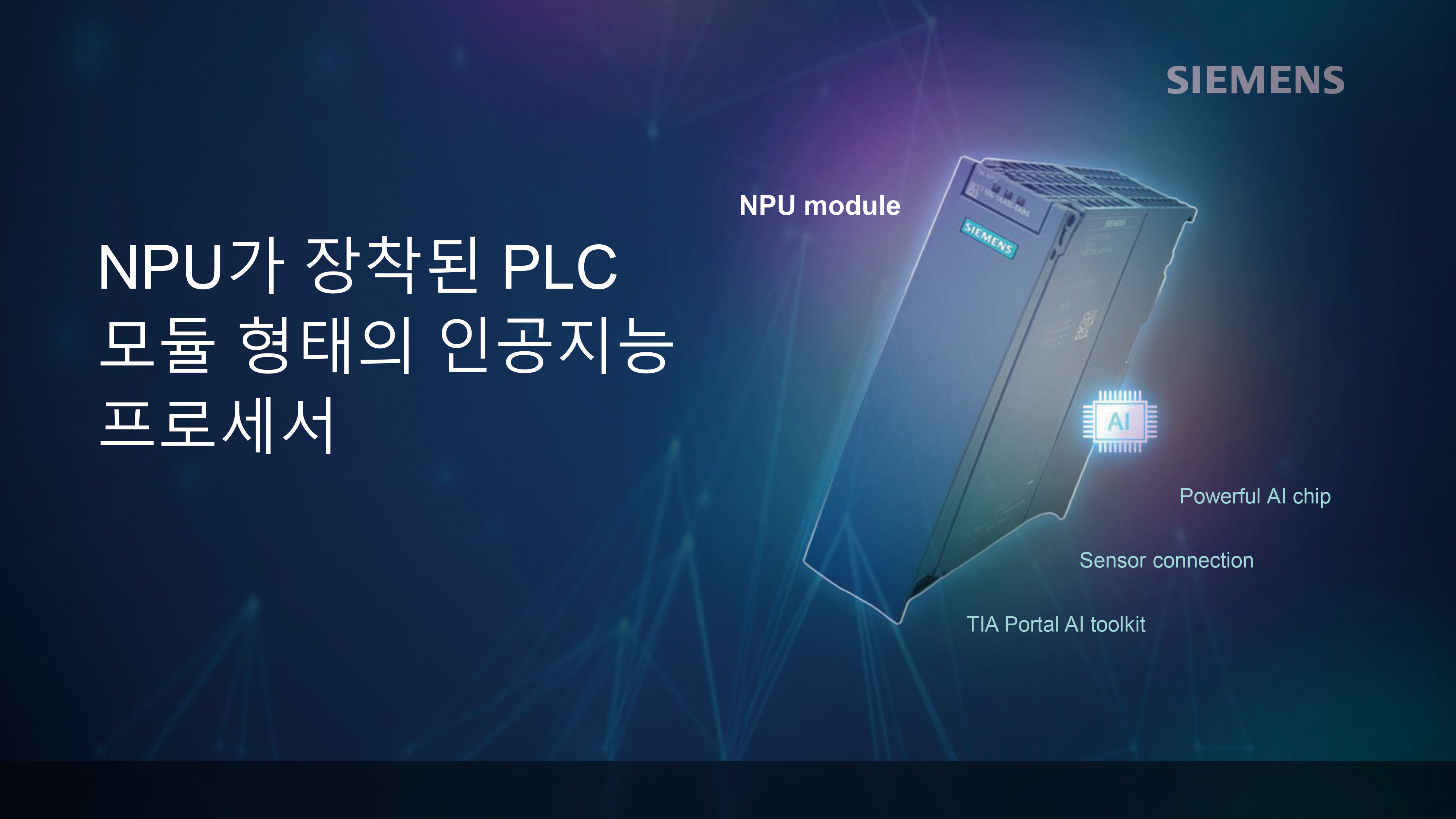
<그림4> NPU가 장착된 PLC-모듈형태의 인공지능 프로세서
또 다른 동영상이 소개됐다.
역시 로봇에 카메라가 설치되어 있다. 카메라는 TM NPU와 같은 인공지능 모듈에 연결되어 있다. 들어오는 형태에 따라서 어떻게 작업을 해야 할지 판단하고 혼자 작업하거나 혹은 옆에 있는 로봇과 협동하면서 조립을 하거나, 혹은 배치하는 작업을 진행할 수 있다. 향후에는 조립라인에서도 서로 다른 로봇이 서로 다른 파츠를 조립하는 것이 가능해질 수 있을 것으로 보인다.
<그림5> 로봇팔에 카메라가 달려있고, 이 카메라에서 들어온 영상은 TM NPU를 통해서 취득이 되고 TM NPU에서는 학습이 된 결과를 통해서 다양한 형태로 들어오는 물건에 대해서 어떤 부분을 그리퍼로 집으면 가장 최적화한 형태로 들어올릴 수 있을 지에 대한 판단을 한다. 즉, 다양한 작업물체가 들어왔을 때도 로봇의 프로그램을 변경할 필요 없이 인공지능을 통해서 들어 올리고 작업하는 것이 가능해질 수 있다는 가능성을 보여주고 있다.
일반적으로 인공지능은 대단히 많은 플랫폼에서 구현이 가능하다. 엣지컴퓨팅이라고 하는 디바이스, 혹은 클라우드에서도 인공지능을 구현할 수 있다. TM NPU 모듈은 PLC와 바로 데이터를 주고받고 그로 인해서 빠른 액션타임을 구현하기 위해 만들어진 모듈 형태의 뉴럴 프로세서다. S7-1500 CPU와 백플레인 버스를 통해서 데이터를 주고받고, 카메라나 오디오, 진동센서 같은 센서들로부터 외부입력을 받아서 내부에 있는 신경망을 통해서 판단을 하고, 그 판단된 결과를 바탕으로 해서 아웃풋을 내보내는 모델이다. 어플리케이션을 통해서 학습된 신경망을 만들어서 이 모듈에 배포를 하고, 텐서플로우나 카페2 같은 오픈소스 러닝시스템 프레임워크를 사용한다.
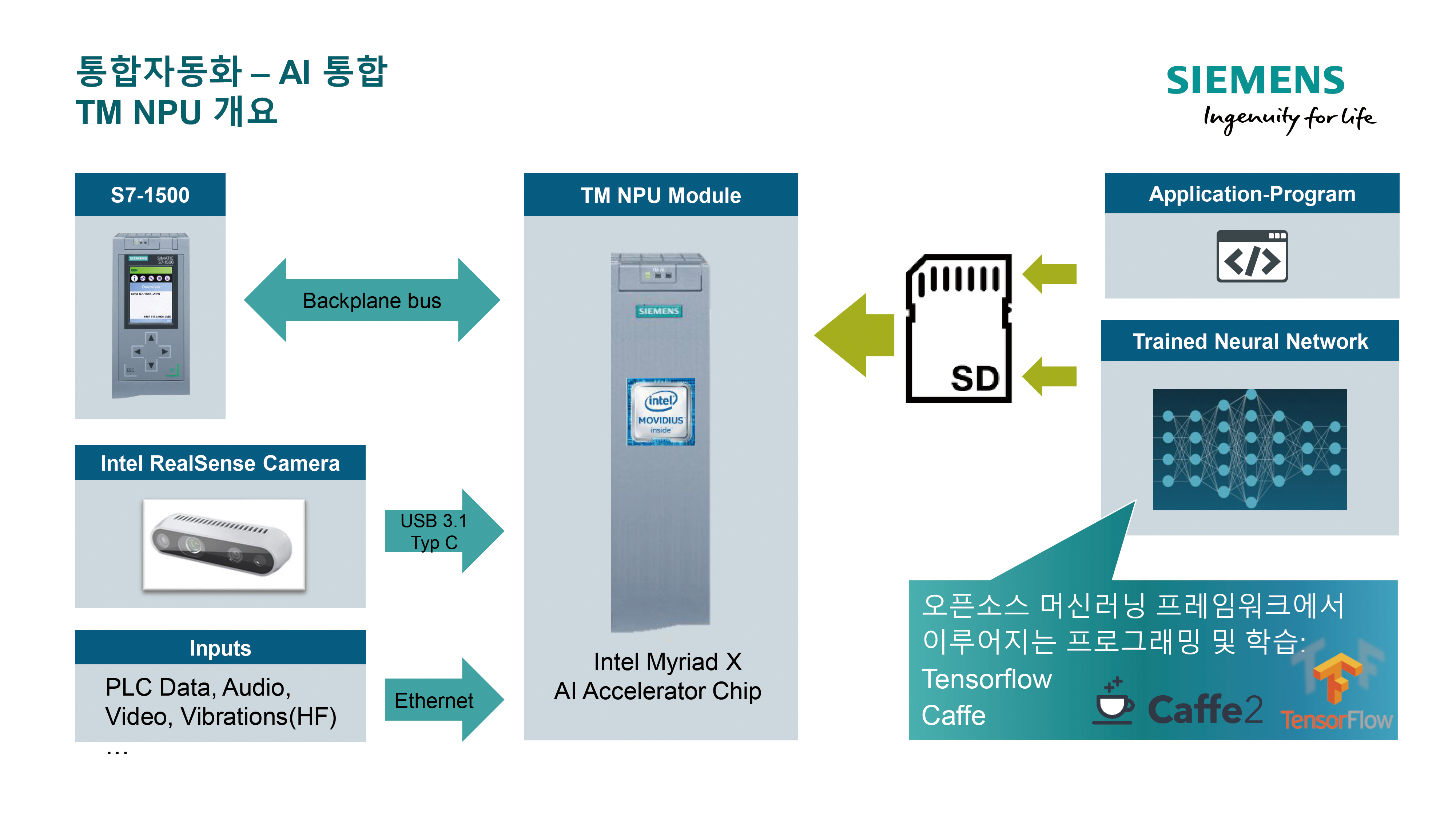
<그림6> TM NPU 개요
지멘스가 바라보는 산업용 인공지능의 미래
윤 차장은 지멘스가 바라보는 산업용 인공지능의 미래에 대해 설명했다.
우선 TM NPU 같은 PLC 인공지능 모듈에 사전에 훈련이 된 신경망을 배포한다. 사용 중에 이미지나 노이즈, 혹은 PLC에서 올라오는 공정 데이터들을 수집해서 엣지 디바이스 혹은 현장에 있는 로컬 PC를 통해서 클라우드로 데이터를 올린다. 마지막으로 클라우드에서는 향상된 신경망을 TM NPU로 자동으로 배포를 한다. 좀 더 발달된 인공지능이 다시 TM NPU로 배포가 되는 것이다. 이런 작업들을 하는 이유는 TM NPU는 PLC 데이터를 직접적으로 받으면서 현장에 즉각적인 반응을 할 수 있지만, 대신 컴퓨팅 파워가 약하다는 단점을 가지고 있다. 반대로 클라우드는 방대한 컴퓨팅파워를 가지고 있지만, 현장에 대한 즉각적인 반응이 어렵다. 그래서 이러한 현장에 있는 신경망을 상위에서 발달시켜서 다시 현장으로 내려주는 선순환구조를 만들어나가는 것이다. 이것이 지멘스가 생각하는 인공지능의 산업에의 적용의 미래다.
여기까지 지멘스의 통합자동화와, 통합자동화에 통합되는 로보틱스, 인공지능에 대한 부분까지 함께 살펴봤다. 이런 것은 사실 쉬운 내용은 아니다. 로보틱스는 아직 여러 밴더들이 작업 중에 있고, 인공지능은 현재 릴리즈된 것이 아니라 사전 검증단계다. 그러나 지멘스는 많은 성공사례를 만들어내고 있고, 수년 내에 정식으로 발매가 되어 인공지능에 많은 지식을 가지고 있지 않은 자동화 엔지니어들도 쉽게 인공지능을 산업현장에 통합할 수 있도록 준비하고 있다.
Ⅱ. SIMOVE, AGV 자동화를 위한 시스템 패키지-강두훈 차장
두 번째 세션은 ‘세상을 움직이는 모션 컨트롤 ‘SIMOVE’ AGV 솔루션‘을 주제로 한국지멘스 강두훈 차장이 발표를 진행했다.
현재 디지털 산업에서 모바일 AGV는 신기술로 채택되어 물류산업 뿐만 아니라 공장자동화 작업도 수행하고 있다. 지멘스는 자동화를 통합하고 전체 가치사슬에서 시스템, 소프트웨어, 미래기술을 주도할 수 있는 고유한 접근방식을 가지고 있다. 시무브(SIMOVE)라는 지멘스 고유의 AGV 자동화를 위한 솔루션이 소개됐다.
AGV와 SIMOVE는 서로 어떻게 다른가?
AGV는 Automated Guided Vehicle의 약자로서, 자동으로 가이드되는 차량이다. 무인운반차.
무인 운반차 시스템은 물건 운송을 위한 자동 제어 차량으로 구성된 실내 육상 자재 취급 시스템이다. SIMOVE는 지멘스 구성요소를 사용한, AGV 어플리케이션 자동화를 위한 소프트웨어 시스템 패키지다. AGV는 A지점에서 B 지점으로 상품을 이동하는 무인 차량을 의미하고, SIMOVE는 AGV 자동화를 위한 시스템 패키지를 의미한다.
일반적으로 사용하고 있는 AGV는 물리적으로 트랙을 만들어서 물리적인 트랙을 따라가게 하는 트랙가이드 방식이라고 하면, SIMOVE를 탑재한 AGV는 물리적인 트랙이 아니라 맵에 가상의 트랙을 만들어서 AGV가 가상의 트랙을 따라갈 수 있게 만들어놓은 레이저 가이드 방식의 AGV다.
체크포인트를 체크하면 AGV가 이동 중에 체크포인트를 반드시 지나가도록 설정할 수 있다. 물리적인 트랙을 설치하지 않기 때문에 변경이나 세팅을 쉽게 효율적으로 할 수 있는 장점이 있다. 물리적인 트랙이 없기 때문에 AGV의 방향은 언제든 달라질 수 있다. 제어는 PC 기반의 오픈 컨트롤러(IPC)가 수행할 수 있다.
SIMOVE는 모든 AGV에 적용할 수 있다. 창고형 AGV에도 적용이 가능하다. SIMOVE는 AGV 어플리케이션을 위한 표준화된 솔루션으로, 쉽게 장비에 적용할 수 있다.
표준 자동화 및 드라이브 구성요소를 사용하고 맞춤화된 어플리케이션 소프트웨어를 사용하기 때문에, 고객의 요구사항을 최적화할 수 있는 장점이 있다. 또한 TIA Portal이 제공하는 개방형 인터페이스를 통해 시스템 확장도 간단하게 할 수 있다는 장점이 있다.
SIMOVE는 지멘스 구성요소를 사용한 소프트웨어 패키지로서, 소프트웨어 측면과 하드웨어 측면으로 나누어서 생각할 수 있다.
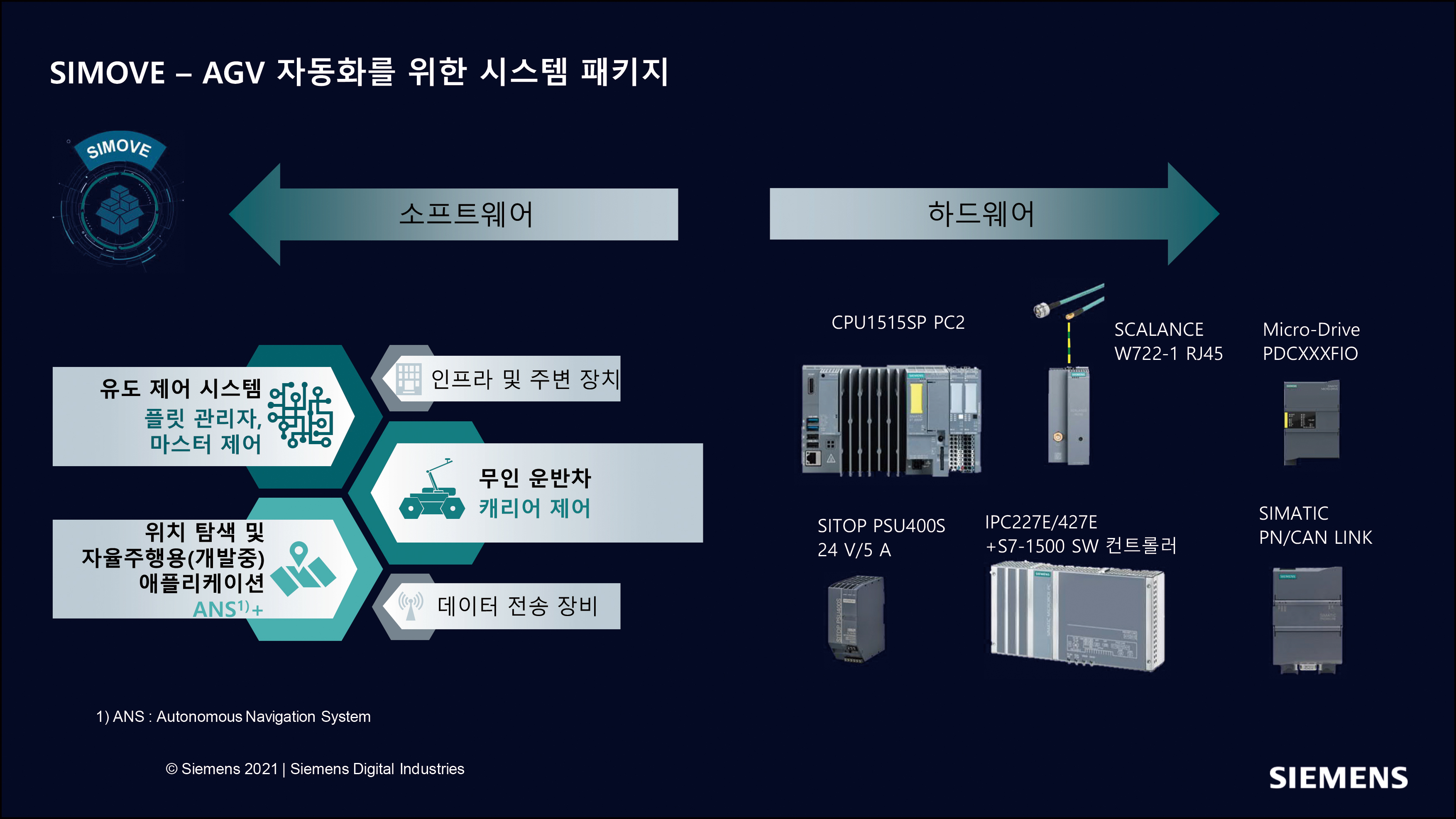
<그림1> SIMOVE – AGV 자동화를 위한 시스템 패키지
소프트웨어 측면은 플릿(Fleet) 관리자나 마스터 제어 같은 유도 제어 시스템, 무인운반차 캐리어 제어, 위치 탐색 및 자율주행용(개발 중) 어플리케이션인 ANS+(Autonomous Navigation System)가 있다.
하드웨어 측면에서는 PC 기반의 오픈 컨트롤러(Open controller)뿐만 아니라 일반 CPU나 IPC를 사용할 수 있다. 스케일런스(SCALANCE) 통신장비를 이용해서 통신을 연결할 수 있고, 구동모터를 제어하기 위한 마이크로 드라이브, 캐리어에 전원을 공급하기 위한 SITOP 파워 서플라이, 서드파티 제품에 대한 통신 확장을 위한 SIMATIC PN/CAN LINK 등도 사용할 수 있다.
또한 지멘스의 많은 소프트웨어들은 모두 다 SIMOVE를 위해 사용할 수 있다.
캐리어에 사용된 소프트웨어는 캐리어 제어 소프트웨어와 내비게이션 소프트웨어가 있다. 캐리어 제어 소프트웨어는 운송, 구동 제어뿐만 아니라 안전제어, 배터리 로드 분석 등을 사용할 수 있고, 이 모든 것들은 TIA Portal 기반의 어플리케이션을 적용한 것이다. 내비게이션 소프트웨어는 위치탐지나 장애물 인식 등의 주행 관련 소프트웨어다.
<그림2>의 상단은 캐리어들이 여러 곳에 운행 중일 때 전체 AGV를 관리할 수 있는 전체 마스터 제어 소프트웨어다.
하드웨어 구성은 S7-1500 Fail Safe CPU나 IPC 등이 제어기로 사용될 수 있고, 통신은 스케일런스 통신제품, HMI 터치패널로 전체 맵 관리나 진단, 시각화 등을 사용할 수 있다. 여기서 중요한 것은 사전에 테스트된 모듈식 소프트웨어다. 마스터 제어 소프트웨어가 그 기능을 수행하게 된다. 이를 통해 플릿 관리자나 운행 구성 도구, 각종 명령, 시각화 및 진단이 마스터 제어 소프트웨어를 통해서 관리가 되고, 앱을 통해서도 진단이나 유지보수가 가능하다.
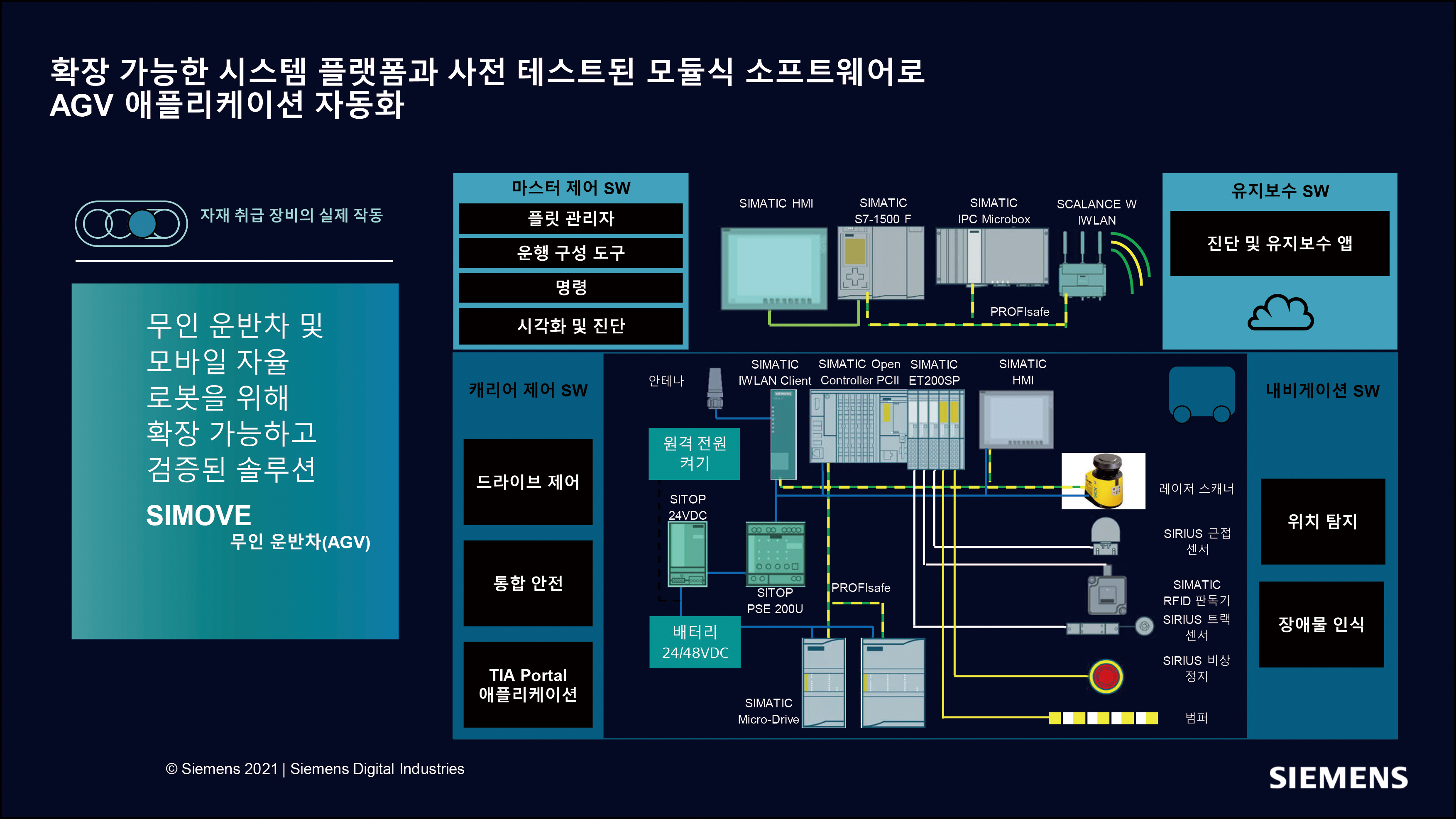
<그림2> 확장 가능한 시스템 플랫폼과 사전 테스트된 모듈식 소프트웨어로 AGV 애플리케이션 자동화
중요한 마스터 제어 소프트웨어를 좀 더 살펴보면, 플릿(Fleet) 제어는 마스터 화면에서 여러 대의 AGV가 운행이 될 때 여러 대의 AGV를 동시에 관리할 수 있는 제어 화면이다.
플릿 제어는 마스터 제어와 플릿 관리자로 구분할 수 있는데, 마스터 제어는 PLC/WinCC 기반으로 자동화 표준을 사용하여 AGV 애플리케이션을 제어할 수 있다. 안전 기능을 포함한 EMS 등과 같은 일반적인 컨베이어 어플리케이션과 유사한 제어방식이 적용된다.
플릿 관리자는 PC/서버 기반의 WinCC OA를 사용하고, 생산 및 인트라로지스틱스 분야를 위한 확장 가능한 개방형 모듈식 플릿 관리가 가능하다. 또한 생산현장 IT 시스템으로 확장도 손쉽게 할 수 있다.
SIMOVE 마스터 제어 –PLC 기반 마스터 제어 HW 아키텍처
마스터 제어는 마스터 화면에서 전체 AGV를 관리하기 위한 내용으로, 마스터 제어에 적용되는 라이브러리는 PLC에서 적용이 된다. 오더 관리나 트랙 구성, 플랜트 및 트랙 시각화, 기능 안전, 진단, 호스트 시스템에 상호 연결 기능 등이 적용될 수 있다. 이를 통해 PLC 당 최대 200대 AGV의 연결이 가능하고, 안전 통신이나 데이터 인터페이스를 주기적으로 할 수 있으며, 신호모듈을 통해서 외부 스테이션과의 통합도 쉽게 할 수 있다.
PC 서버를 통해 AGV 어플리케이션 관리가 가능한 SIMOVE 플릿 관리자는 그래픽 플릿 및 추적 구성이 가능하다. 이를 통해 통합 오더 관리, 대시보드 및 상태 화면을 포함한 플릿 관리, 통합된 핵심 SCADA 기능, 연결 모니터링을 비롯하여, 시스템 상태 확인, 알람 분석, OEE 및 KPI 계산, 스마트 스케줄러 같은 기능을 활용할 수 있다.
전체 맵 관리는 HMI 인터페이스를 통해서도 가능하다. HMI를 통해서 플릿 구조의 자동구성이 가능하고, 운영자가 사용하기 쉽고 유지보수가 간편한 장점이 있다. 또한 AGV 공급업체와 무관하게 플랜트 전체에서 사용이 가능하다.
따라서 트랙 레이아웃이나 트랙 상태를 확인할 수 있고, AGV 운전방향, 상태, 위치에 대해서도 확인이 가능하며, 시스템 메시지도 한눈에 확인할 수 있다.
지멘스의 테크노매틱스(Tecnomatix), 플랜트 시뮬레이터와 PLCSim Advanced를 통해 버추얼로 확인이 가능하다.
AGV 트랙을 포함한 공장 시뮬레이션 내용이다. 우선 PLCSIM Advanced 인스턴스를 시작한다. 원본 TIA Portal SIMOVE Master 제어를 가상 컨트롤로 다운로드하고 HMI 프로젝트의 WinCC 시뮬레이션을 시작한다. 마스터 제어를 위한 가상 PLC와 플랜트 시뮬레이션을 연결하고 사양에 따라 가상 PLC에서 시뮬레이션 AGV와 인터페이스한다. 플랜트 시뮬레이션에서 시뮬레이션을 시작한다. 마스터 제어에 의해서 실제 AGV처럼 시뮬레이션된 AGV 동작을 확인할 수 있다. 마스터 제어와 기계통신에 대한 시뮬레이션도 가능하다. 진단정보를 포함한 HMI에 대한 가상 커미셔닝과 HMI 트랙에 있는 AGV에 대한 자세한 정보, 진단내용 등이 확인될 수 있다.
다음은 지멘스가 궁극적으로 추구하는 AGV에 적용하고자 하는 자율주행 기술이다.
AGV가 1950년대 시장에 출시된 이후로, 수년 동안 레일이 아닌 바닥의 와이어를 따라가는 견인트랙에 불과했다. 하지만 이 기술은 근래에 들어 더욱 정교해졌으며, 트랙기반의 트랙가이드 AGV가 사용되고 있고, 오늘날에는 레이저 항법, 레이저 가이드 방식의 기술이 점점 더 채택이 되어 가고 있다.
오늘날 AGV는 기존의 트랙을 따라가는 방식이 아니라 스스로 길을 찾아서 움직일 수 있는 기술에 거의 도달하고 있다. 이를 위해 지멘스는 자율주행 AGV가 실제로 산업현장에 적용될 수 있도록 하기 위한 기술개발을 이어가고 있다.
자율주행에는 센서의 역할이 중요하다. 가상 트랙 센서나 내비게이션 주행을 위한 마그네틱 센서, 그리고 유도 광학센서를 이용해서 데이터 매트릭스 등의 구현이 가능하다. 또한 AMS+나 SLAM 기반의 특성들이 적용이 되어야 하고, 경로나 맵 확정을 위해서 주변환경에 대한 2D 윤곽선을 사용할 수 있고, 필요한 경우 반사마크로 보완할 수 있다. 미세조정 및 상대적 위치는 ±10mm, 그리고 ±0.1rad의 정확도로 지정이 될 수 있고, 디지털맵에서 미리 정의된 궤적경로를 기준으로 이 정확도가 달성될 수 있다. 탄성밴드 접근방식에 의해서 장애물 감지가 가능하고, 경로구성, 식별지정 및 진단을 위한 엔지니어링 툴도 사용할 수 있다.
현재 방식은 인프라가 기반이 되는 방식이라고 하면, 자율주행방식은 기존의 인프라에 구애받지 않는 방식으로 다양하게 적용될 수 있다.
PC에서 실행되는 ANS+ 런타임과 PLC 사이에는 두 개의 지정된 인터페이스가 있다. 첫 번째로 차량 인터페이스다. 이것은 가상 트랙 센서를 사용한 가상 추적을 위해 사용된다. 두 번째는 호스트 인터페이스다. 이것은 오더 핸들링을 위해서 사용된다. AGV에서는 안전관련 조치도 다양하게 적용될 수 있다. 일반적으로 4가지 정도가 안전관련 조치로 적용이 된다. 사람 및 물체 탐지를 위한 안전 레이저 스캐너, 비상정지 기능, 속도 모니터링, 위치 등이다.

<그림3> SIMOVE ANS+ 내비게이션
<그림3>에 보이는 자율주행 AGV는 포크리프트 타입의 AGV다. 해당 물품이 있는 곳에서 AGV가 자율적으로 물건을 떠서 움직이는 것까지 가능하다. 일반적인 AGV가 트랙을 따라서 움직이는 경우에는 정해진 경로를 따라 가는 것이지만, 이 포크리프트는 물건의 형상을 보고 자동으로 물건을 들어서 이동하는 것까지 가능하다. 간단하게 들어서 올리는 것이지만 대단히 어려운 기술이다.
TIA Portal에서 SIMOVE 프로그래밍 이점
PLC 및 AGV를 위한 단일 엔지니어링 환경에서 모든 기능이 포함된 SIMOVE Library는 용도에 따라 커스터마이징이 가능하다. 이를 통해서 작업을 간소화할 수 있고 일관된 프로그래밍 및 작동 인터페이스로 적은 인력으로 많은 출력을 달성하는 처리능력 향상을 기대할 수 있으며, 이를 통해서 효율이 증대된다.
AGV 공급업체와 무관하게 프로그램을 적용할 수 있어서 프로그램 인터페이스의 오류가 발생하지 않고 이로 인한 비용을 감소할 수 있다. 소프트웨어 사용시 많은 시간을 할애할 필요가 없는 매우 편리하고 사용자 친화적인 엔지니어링 툴을 이용해서 작동이 간단해진다. AGV에 대해서도 일반적인 자동화에 적용되는 진단내용이 적용될 수 있어서 유지관리를 포함한 진단옵션도 사용할 수 있다.
Ⅲ. SINAMICS DriveSim Basic 가상화 시뮬레이션 소개-가현석 부장
다음은 한국지멘스 가현석 부장이 ’SINAMICS DriveSim Basic 가상화 시뮬레이션 소개‘를 주제로 발표를 진행했다. SINAMICS DriveSim Basic을 통해 엔지니어링 단계 및 개발시간을 단축할 수 있다는 것이 핵심내용이다.
요즘에 적용하는 모션 어플리케이션은 복잡성 및 확장 가능을 위한 다양한 요구사항에 대응할 수 있는 포트폴리오를 필요로 한다. 확장 가능한 포트폴리오를 통해 적합한 제품을 사용할 수 있다. 이의 핵심은 어플리케이션이 초점이라는 것이다. 고객이 궁극적으로 구현하고자 하는 것을 기반으로 하며, 포트폴리오가 어플리케이션에 정확히 만족하면 과도한 엔지니어링이나 추가비용이 발생하지 않는다. 제품과 시스템의 확장성에 대해 설명이 됐다.
우리는 모든 면에서 확장 가능한 시스템을 요구하며, 이것은 제품 및 시스템에서 구분할 수 있다. 제품 레벨에서는 기능 및 성능이 확장 가능하고, 컨트롤러, 드라이브 레벨에서 확장 및 실행을 할 수 있다. 시스템 레벨에서 엔지니어링 워크플로우 즉 어플리케이션 구성 및 머신동작에서 공장의 크기와 복잡성을 확장할 수 있다.
우리가 일상적으로 필요로 하는 것들을 생산하는 전형적인 시설을 확인해 보자.
일반적인 요구르트형 포장 시스템이 있다. 용기를 채우려면 모든 프로세스가 서로 유기적으로 연결되는 시스템이 필요하다. 가장 다양한 모션제어 응용제어 프로그램을 확인해 볼 수 있다.
모션 컨트롤 동작을 자세히 살펴보면 모든 것이 동기화되고 구동된다. 첫 번째 모듈에서는 공급을 위해 회전하는 동작을 볼 수 있다. 조건에 따라 연속적으로 공급된다. 두 번째 모듈에서는 요구르트 깊이에 따른 충진기 동작이 있으며, 세 번째 모듈에서 컵을 닫고 호일을 상단 롤에서 꺼내 컵 위에 놓고 접합 및 실링한다. 그다음 컵이 모두 연결되어 있어 블록이 만들어지고 가장자리가 잘리거나 둥글게 된다. 마지막 핸들링 모듈은 개별블록을 가져와 포장한다.
<그림1>에 보이는 것은 다양한 모션 컨트롤 기능들인데 이 모든 것들이 복합적이고 다양한 기본기능들을 포함하고 있다.
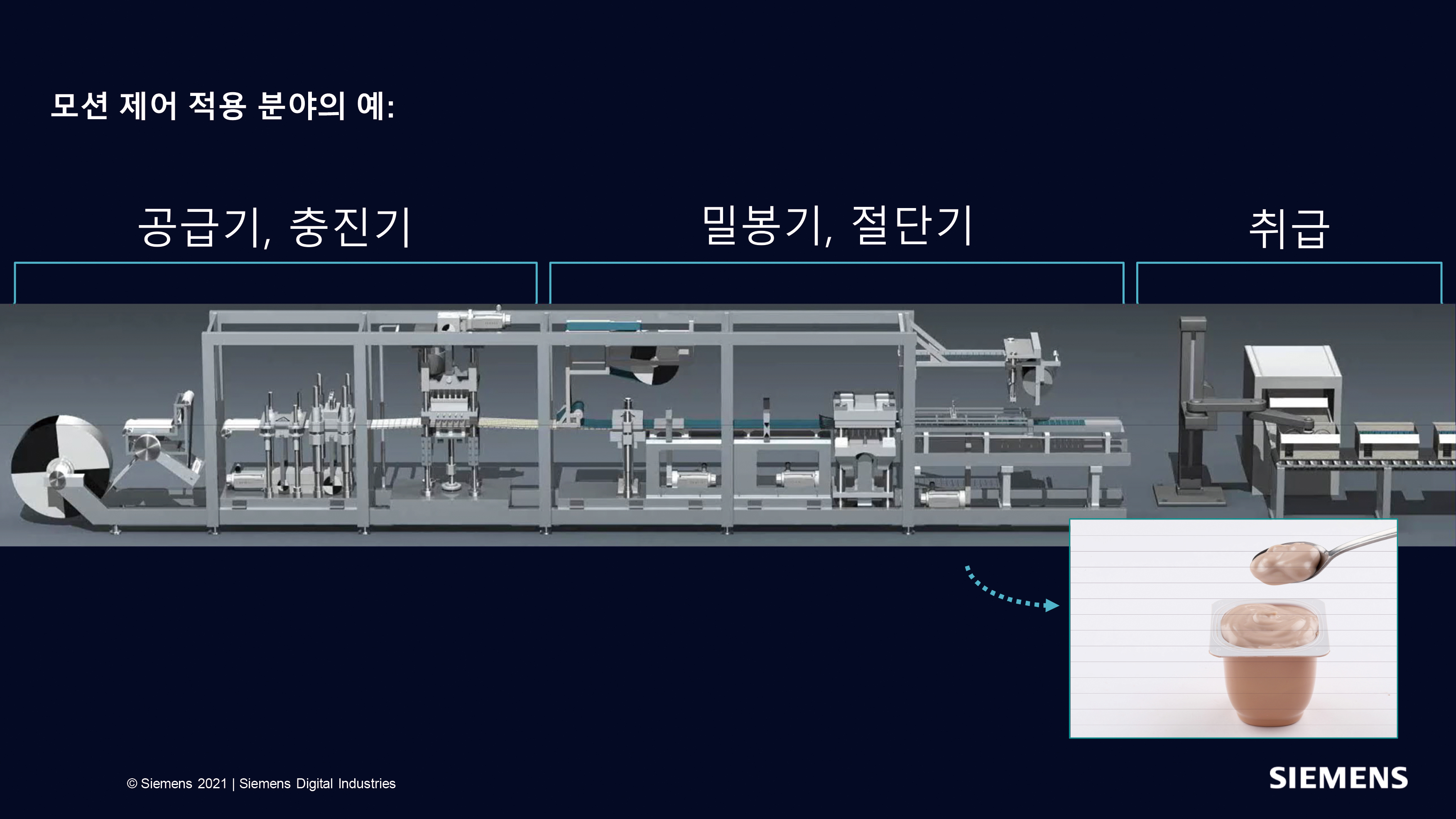
<그림1> 다양한 모션 컨트롤 기능
모션 컨트롤 이동수단인 컨베이어 벨트가 보이고, 현재는 로봇들이 바삐 움직이고 있기 때문에 제 위치로 동작해야 한다. 그 후 많은 프로세스들이 동기화되고, 주입공정으로 이동한다. 이런 것들은 기계 캠 디스크에 연결되어 있어서 슬라이드가 더 빨리 실행되며, 모든 축이 더 빨리 실행된다. 주입구가 용기입구에 맞춰 이동되므로 주입구 공정에는 캠 디스크 프로파일이 있다. 이것은 더 빠르고 더 느리다는 것을 의미한다. 그리고서 핸들링 모듈이 요구르트를 상자 안에 밀어 넣는다. 과거에는 일반적인 X, Y 핸들링 시스템이나 로봇으로 매우 비싸고 프로그램이 매우 복잡했다. 이러한 복잡한 연결은 하나의 시스템에 모두 포함되어 있어서 사용이 간편하다. 이런 어플리케이션은 어떻게 구현될 수 있나? 모션 제어 개체는 사용자가 구현하도록 지원하며, 이것들은 모든 SIMATIC PLC 제어장치의 기본요소다. 테크놀로지 오브젝트 즉 TO는 어플리케이션의 동작제어 기능을 쉽게 볼 수 있도록 하며, 사용자 친화적인 입력데이터를 통해서 구성 및 설정된다.
TO는 드라이브 축 설정 및 제어 진단이 쉽게 가능하며, 자동으로 구성 및 설정된다. 드라이브 관련 표준화된 데이터가 실시간으로 PLC 축 오브젝트로 통신한다. 이로 인해 엔지니어링 시간 감소 및 일관된 프로그램을 쉽게 적용 및 시연할 수 있다. 각 동작의 프로그램은 PLCOpen에 따라 표준화된 기능들에 기초하며, 모든 시마틱 프로그래머가 적용할 수 있다.
<그림2> 컨트롤러 수준에서 확장이 가능한 간단한 모션 제어
드라이브 기술의 디지털화는 디지털 인더스트리 포트폴리오에 통합되고 있다. 생산 및 공정산업에서 많은 드라이브가 사용되고 있다. 드라이브 기술은 사용자뿐만 아니라 플랜트 및 머신빌더에게도 디지털의 세계로 진입할 수 있게 한다. 드라이브 트레인을 위한 디지털화 포트폴리오는 설계에서 계획, 엔지니어링, 생산, 서비스에 이르기까지 완전한 가치사슬에 걸쳐 확장된다. 포트폴리오는 효율적인 엔지니어링 도구, 시나믹스 스타터 드라이브, 사이저 ET 컨피규레이터, 스마트분석 외에도 클라우드 및 엣지 어플리케이션 및 디지털 서비스에도 드라이브를 간단히 연결할 수 있는 기능이 포함되어 있다. 이런 솔루션을 사용하면 드라이브 트레인 상태 및 드라이브 구성요소를 모니터링하여 실제 서비스 요구사항을 식별할 수 있다. 이를 통해 기계와 공장의 가용성과 생산성을 높이고 새롭고 혁신적인 데이터 기반의 비즈니스 모델을 지원한다.
그리고 서비스 포트폴리오의 새로운 기능이 출시됐다. 드라이브 가상화다. 이것은 SINAMICS DriveSim 가상화 툴을 통해서 드라이브 동작을 사전에 보정 및 최적화할 수 있다. 오늘날 디지털화 및 소프트웨어 지원 솔루션이 없는 하드웨어는 상상할 수 없으며, 현대 산업생산설비는 자동화 및 드라이브 기술 디지털화에 모두 적용되고, 엔지니어링 또는 가상화 계획 및 장비 실행 가능한 솔루션을 필요로 하는 모든 기업에 필요하다.
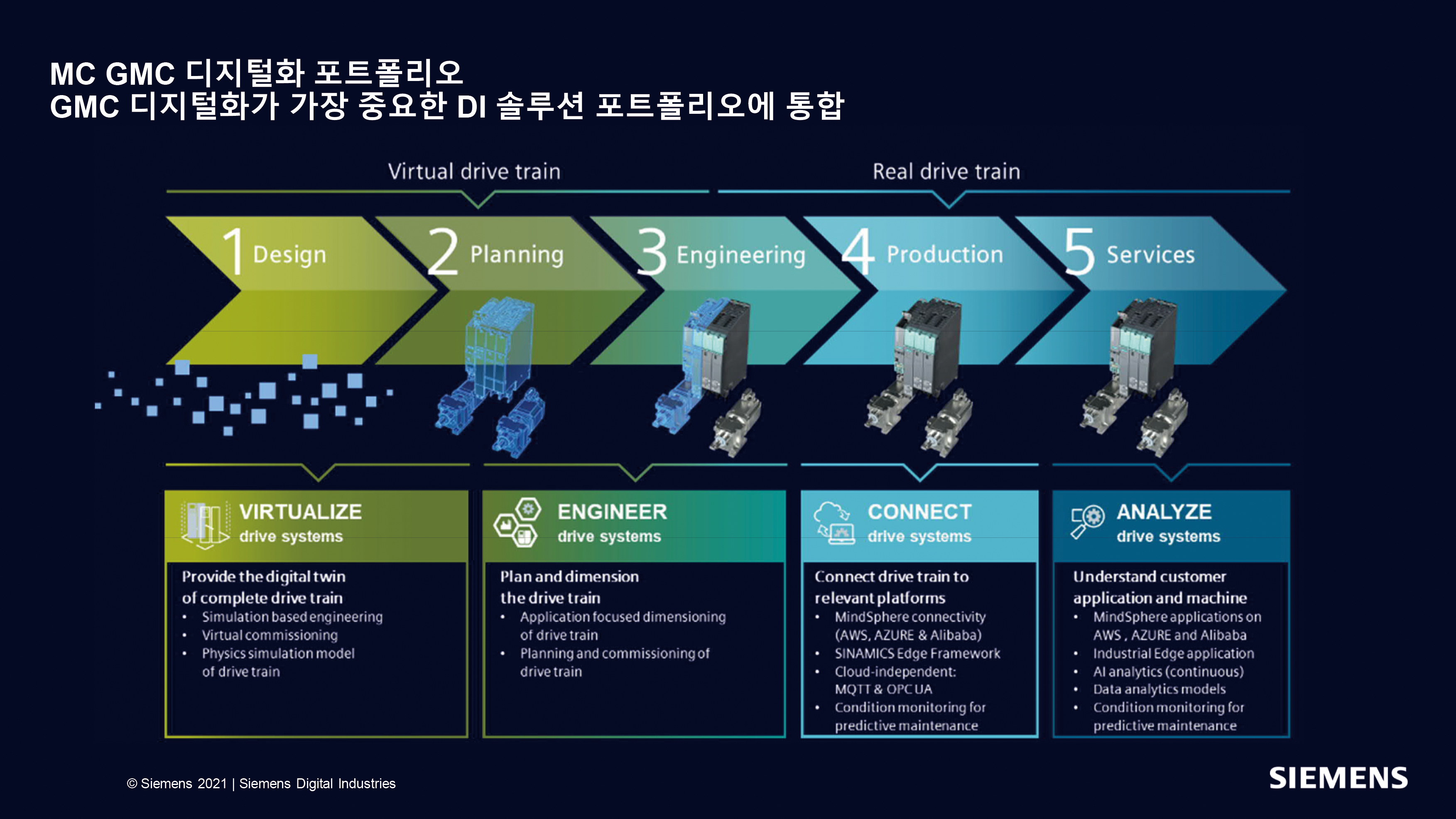
<그림3> MC GMC 디지털화 포트폴리오. GMC 디지털화가 가장 중요한 DI 솔루션 포트폴리오에 통합됐다.
기계 개발업체는 두 가지 큰 도전에 직면해 있다.
첫 번째 도전과제는 개발 및 엔지니어링 단계가 길어지면 초기비용이 높아진다는 것이다. 두 번째는 장비개발에 대한 많은 테스트가 필요하며 이것으로 인해 시간 및 비용이 증가한다는 것이다. 이를 해결하기 위해 SINAMICS DriveSim Basic이 출시됐다. 가상화를 통해서 시장출시시간을 단축하며, 고객이 사전에 설계단계부터 리스크를 줄일 수 있게 만들 수 있다. 가상화는 물리적인 PLC 프로그램 유효성 검사, 시운전 기능 검증, 기계 동적 부하 특성, 전기 모터 특성, 열적 구성 요소 등을 제공한다. 이로 인해 사용자는 시뮬레이션 전문가가 필요하지 않다. 가상화 솔루션은 SINAMICS DriveSim Basic이 지원한다.
가상화 솔루션 DriveSim Basic은 표준화된 FMU(Funtion Mockup Unit)로 사용할 수 있는 파라미터를 최소한의 노력으로 드라이브 시스템 시뮬레이션을 쉽게 확인 및 설정할 수 있다. Simit, Simcenter Amesim, Matlab Simulink 등 표준 시간 기반 시뮬레이션 도구와 호환이 가능하다.
기능으로는 PROFIdrive 텔레그렘 1, 2, 3, 4를 지원하며, 드라이브, 엔코더 시퀀스 제어, setpoint 채널, 시뮬레이션 기능으로 SINAMICS 런타임에 대한 테스트 및 검증으로 정확한 동작을 보장한다.
DriveSim Basic은 사용자 친화성과 핵심적인 기능 지원으로 시장 출시시간 단축이 가능하며, SIMATIC S7-PLCSIM Advanced, NX Mechatronics Concept Designer와 같은 가상 지멘스 솔루션과의 통합 및 개발 프로세스가 가능하다. PLC의 가상 커미셔닝을 포함한 기계적 상호 작용과 PLC의 자동 테스트 및 유효성 검사를 허용한다. 시뮬레이션 기반 엔지니어링을 통해 전체 가치사슬에서 디지털화의 이점을 제공하며, 전기 설계를 고려하지 않고 드라이브 시스템의 논리적 및 기계적 시뮬레이션 도메인을 연결하여 통합 테스트 작업이 감소된다.
SINAMICS DriveSim은 모든 드라이브에 적용이 가능하다. 새로 출시되는 모든 SINAMICS Drive는 SINAMICS DriveSim Basic 사용이 가능하다.
SINAMICS DriveSim Basic은 기존 설계 엔지니어의 워크플로우에 통합이 됐다. 공동 시뮬레이션의 SIMIT, Amesim을 연결하고 PLCSIM Advanced에서 시퀀스 및 실제 드라이브 데이터를 확인할 수 있다.
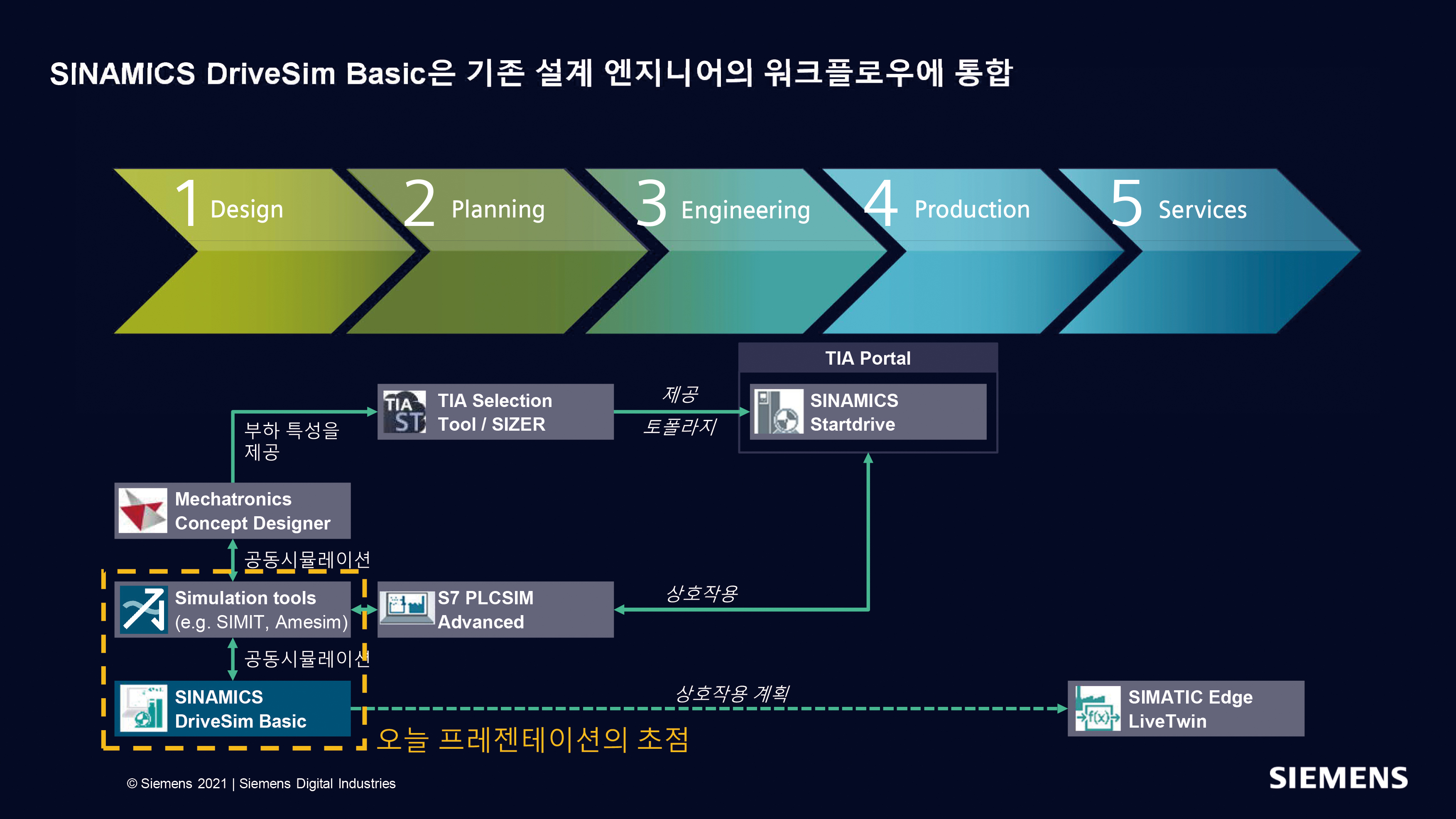
<그림4> SINAMICS DriveSim Basic은 기존 설계 엔지니어의 워크플로우에 통합됐다.
SINAMICS DriveSim Basic의 구현기능은 주로 두 가지 주요 어플리케이션 기능을 대상으로 한다.
첫째 가상 PLC 커미셔닝이다. 시스템을 설계하는 경우 PLC코드와 시나믹스 드라이브가 함께 작동하는지 확인해야 한다. TIA Portal에서 PLC 코드를 작성한 후 PLCSim Advanced를 사용하여 프로그램을 프로세스, 시뮬레이션, 도구 시밋에 연결할 수 있다. DriveSim Basic은 실제 시나믹스 드라이브와 가상 PLC에 하는 것처럼 PLC에 대한 사실적 입력출력 신호를 SIMIT에서 FMU로 제공한다. SIMIT에서 관련 어플리케이션 신호를 메카트로닉스 컨셉 디자이너(External Mechatronics Concept Designer)로 전송하여 부하이동 방식을 시각화할 수도 있다.
둘째, 드라이브 사이징을 위한 로드 특성 제공이다. 기계설계를 하는 경우 시나믹스 컨버터와 시모틱스 모터를 드라이브 응용 프로그램에 가장 저급한 모터로 선적해야 한다. SINAMICS DriveSim Basic은 제어장치에 구애받지 않으며, 장치 데이터와 함께 제공되지 않고 특정 제어장치를 정의하기 전에도 원하는 기능의 시뮬레이션에 집중할 수 있다. 시뮬레이션 결과는 부하 프로파일 즉 사용자의 제약조건과 어플리케이션의 모델의 영향을 받는다. 그에 따른 토크 또는 속도 곡선을 확인할 수 있다. 이러한 부하 프로파일을 사이저 TIA 셀렉션 툴로 가져와 적절한 컨트롤 유닛과 드라이브 및 모터를 선택하여 가장 잘 선정할 수 있다. 시마틱 엣지와의 연결은 계획 중에 있다.
다음은 SINAMICS DriveSim Basic과 시뮬레이션 툴인 SIMIT을 통한 드라이브 시뮬레이션 이다. DriveSim Basic을 통한 드라이브 시뮬레이션이 실제 어플리케이션에 어떻게 적용되는지 알아보자.
가상으로 시운전을 하기 위해서는 드라이브에 대한 세 가지 확인 및 검증이 필요하다.
첫 번째는 공통적으로 많이 사용하는 자동화 로직에 대한 검증이 필요하다. 가상 PLC에서 연결된 텔레그램으로 정화한 신호가 전달이 되고 드라이브에서 실제 속도 확인이 가능한지 검증할 수 있다. 여기서는 드라이브 동작 또는 변화하는 동작에 대해 전혀 신경을 쓰지 않는다. 따라서 전체적 속도지령은 실제 대상과 동일하다. 이것은 단지 논리적인 신호검증만 가능하다.
두 번째는 매우 흔한 속도제어 시운전 경우다. 예를 들어 펌프 주변의 환기장치 설계에 대해서 구동하는 속도제어기가 있다. 속도지령은 설정 토크로 변화하고, 이로 인해 모터와 부하를 구동하는 장치다. 속도 컨트롤러와 내부 기계적 정의를 포함하고 단순한 회전관성 또는 복잡한 시뮬레이션을 가능하게 하는 오실레이터가 있는 장비도 가능하게 된다. 또한 외부 기계장치에 대한 시뮬레이션도 지원할 예정이다.
세 번째는 동적인 위치제어 시운전이다. PLC와 서보 컨트롤의 연결 시스템이 있다. 이러한 시스템은 오실레이터가 있는 코닝머신, 프린팅머신 등은 텔레그램 5 또는 DSC 다이나믹 서보 컨트롤이 포함한 텔레그램 105도 지원한다.
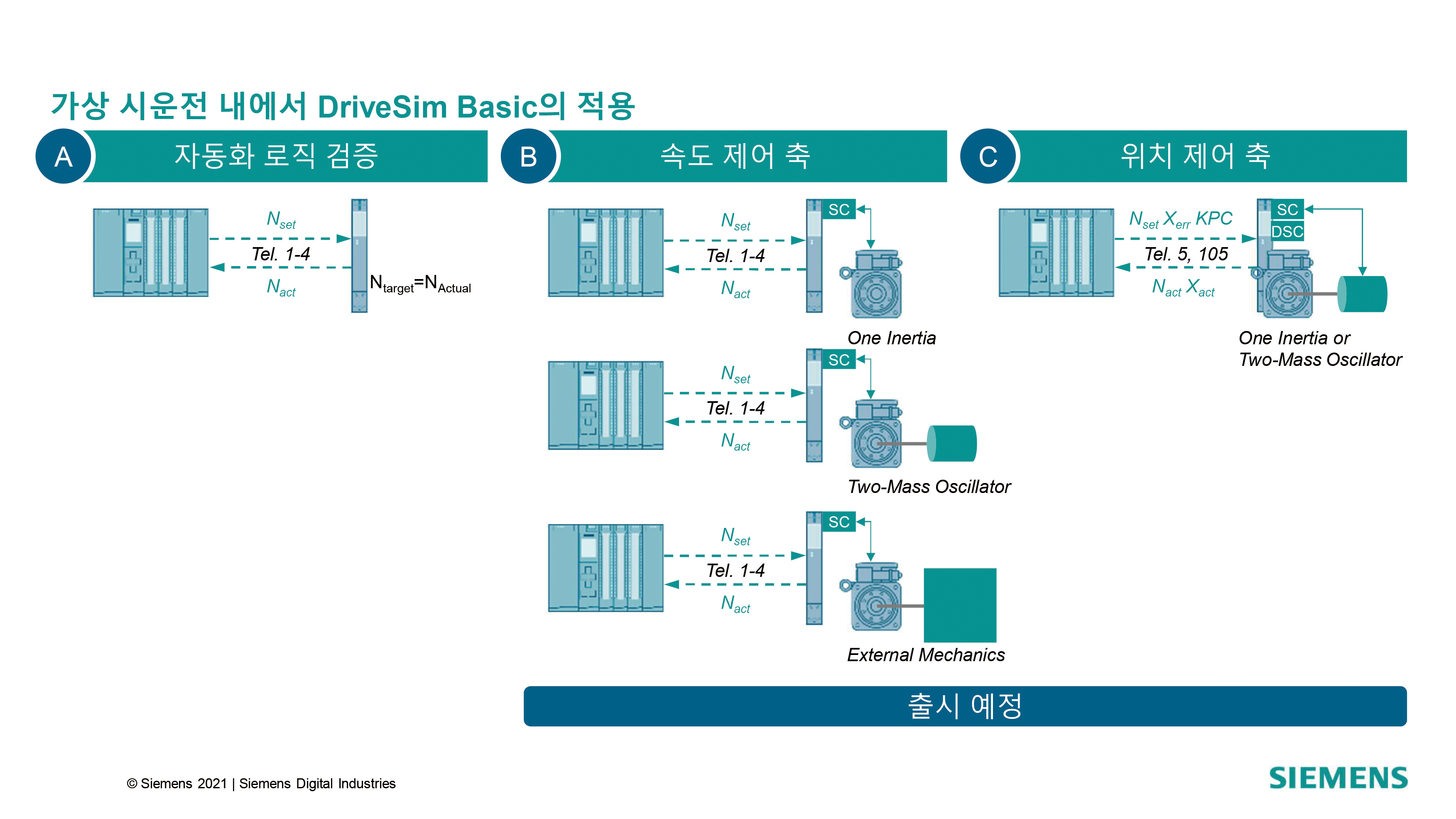
<그림5> 가상 시운전 내에서 DriveSim Basic의 적용
SINAMICS DriveSim Basic의 기능
DriveSim Basic의 기능에는 두 가지가 있다.
<그림5> 왼쪽에는 로직 드라이브 시뮬레이션 입력을 PLC로 받고, 받은 신호는 프로피드라이브 텔레그램 1, 2, 3, 4에 의해서 시퀀스 파라미터가 실행이 되고, 드라이브 내부에 있는 셋포인트 채널을 통해서 출력이 된다. 피드백은 외부 기계장치의 실제속도를 받는 시스템이다.
출시예정인 동적 드라이브 시뮬레이션은 속도 컨트롤 안에서 PT2 동적필터를 통한 속도제어, 로직필터, 위치제어에서 위치오차를 감쇄하는 다이나믹 서보에서 계기값 설정 등을 시뮬레이션할 수 있다. FMU으로 인해 Amesim, Matlab, Ansys, SIMIT 등 다양한 시뮬레이션 툴과 완벽히 통합이 가능하다.
DriveSim Basic을 사용한 드라이브 시스템 시뮬레이션, SIMIT의 설정 및 파라메터
DriveSim Basic이 어떻게 SIMIT 내에서 설정 및 파라메터 변경할 수 있는지 확인해 보자.
DriveSim Basic은 가상 엔지니어링 워크플로우 내에 있는 시밋 시뮬레이션에 실행된다. <그림6> 왼쪽에 있는 PLCSIM Advanced는 가상 PLC 로직 확인 툴이다. 여기에서는 Technology Object(TO) 내부에 구성이 되어있다, 드라이브 축 구성을 포함하고 있으며, PROFIdrive 텔레그램을 통해서 복잡한 데이터를 주고받을 수 있다. 가상 시뮬레이션과 연결되어 있는 SIMIT 내에서 드라이브 실제 시뮬레이션 데이터 설정이 가능하다. SIMIT은 NX MCD 툴과도 연결이 가능하다.
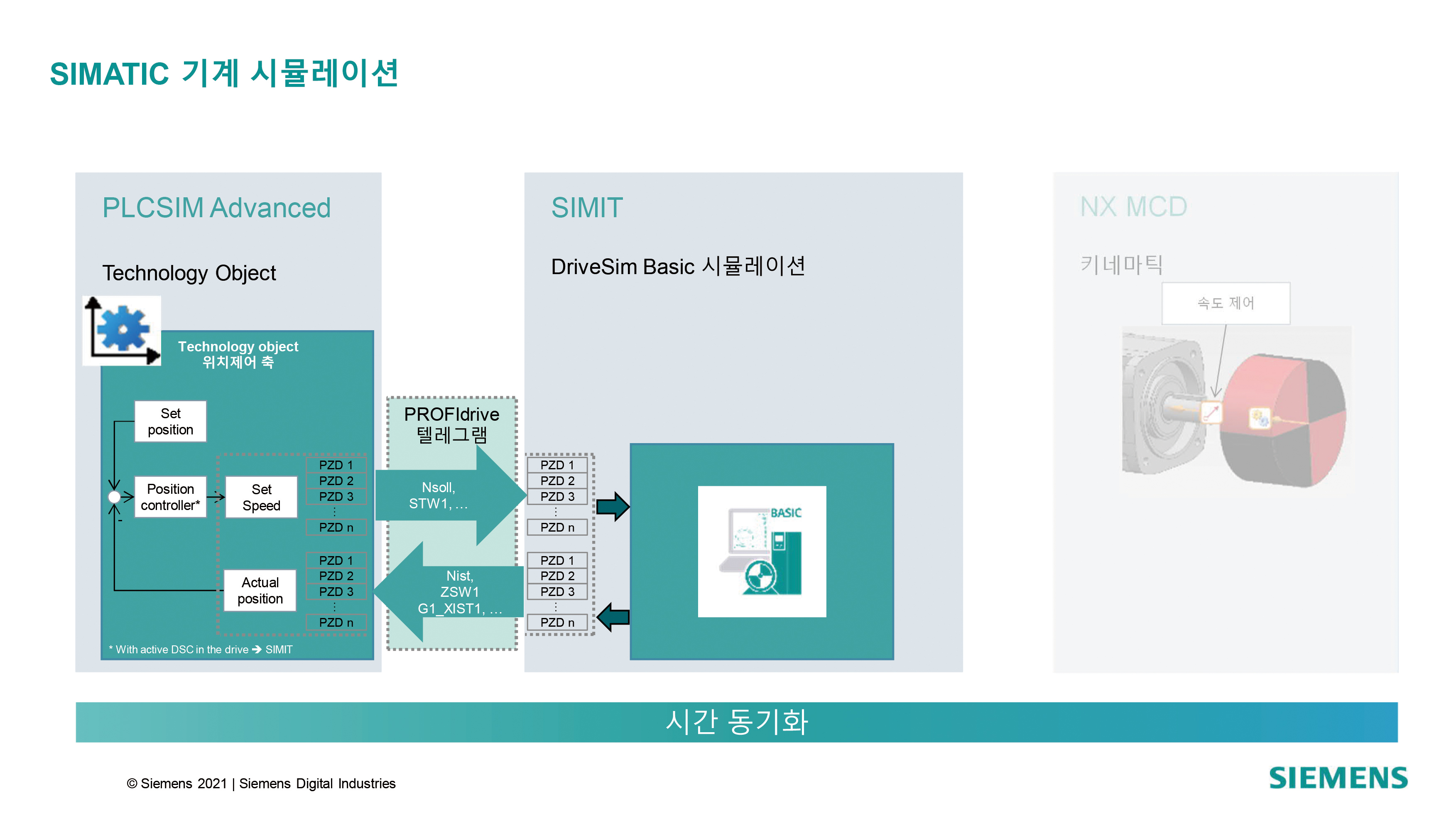
<그림6> SIMATIC 기계 시뮬레이션
SIMIT 내 DriveSim은 FMU 모델로 공급한다. 이 파일은 매트랩 시뮬링크로부터 제공되며, 컴파일을 실행한다. SIMIT은 컴파운드 타입 에디터 CTE가 필요하다. 변환된 .simcmp 실행파일은 SIMIT 소프트웨어로 다운된다. 여기까지가 DriveSim이 SIMIT에서 실행하기 위한 과정이다.
실제로 지멘스 온라인 사이트에서 CTE 변환과정이 없는 <그림7> 오른쪽 박스에 보이는 SIMIT ’Look-and-Feel‘을 다운로드하고, 단지 SIMIT 시뮬레이션 툴에서 드라이브를 쉽게 시뮬레이션 할 수 있다.
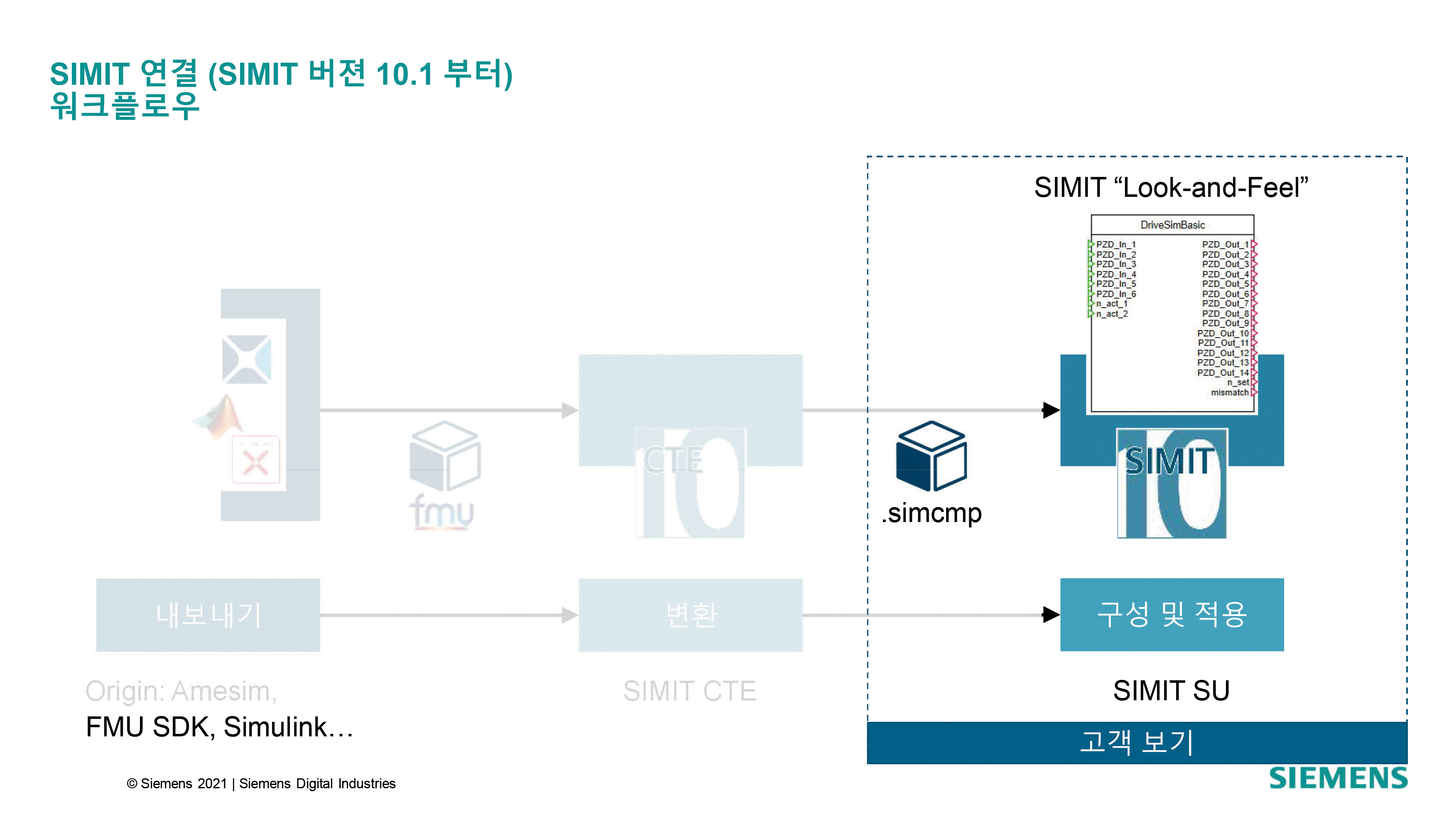
<그림7> SIMIT 연결 워크플로우
DriveSim Basic의 파라메터 설정
PLC로 입력받은 값은 DriveSim 내부 속도 컨트롤러 및 내부 부하를 거쳐 다시 PLC로 보내진다. 파라미터 설정은 필터 설정, 내부 부하 파라미터 설정, 내부/외부 부하에 대한 시퀀스 등을 설정할 수 있다. 다음은 PLC와 통신속도 설정, 엔코더 설정, 프로피드라이브 텔레그램, 속도제어 관련 파라메터 등을 설정할 수 있다.
SIMIT에서 DriveSim 연결은 속도 컨트롤러와 내부 부하 설정을 통해서 가상으로 시뮬레이션이 가능하다.
가장 일반적으로 광범위하게 적용하는 시스템이다. SINAMICS DriveSim Basic이 개별 드라이브를 다음 단계로 맵핑함수로 엔지니어링 구성단계에서 실제 시뮬레이션을 가능하게 하는 기능블록을 제공한다. 라이브러리 사용도 함께 포함된 기능블록은 표준기능 장치 FMU로 사용할 수 있다. 이제 가상드라이브를 실행하기만 하면 해당 드라이브 하드웨어가 검증되고 실제 디지털 트윈에 적용할 수도 있다.
FMU는 사용자가 자체적으로 포함된 탬플릿 또는 라이브러리처럼 동작하기 때문에, 이를 통해 얻을 수 있는 큰 이점은 호환성이다. 사용자가 SIMIT, Simcenter, Amesim, MX모션 또는 심지어 Matlab 같은 타사 솔루션을 선택하는 시뮬레이션 도구에 상관없이 사용이 가능하다.
FMU는 산업표준인 다른 시간 기반 시뮬레이션 링크 프로그램에서 사용될 수 있다. 예를 들어 S7 PLCSIM Advanced 또는 NX Mechatronics 공동작업이다. NX Mechatronics Concept Designer 및 TIA Portal과의 커뮤니케이션 사용자는 완전히 통합된 모델기반 개발 프로세스를 구현한다. 새로운 FMU는 외부 부하의 통합도 가능하도록 지원한다.
이번 세션에서는 DriveSim Basic 데모 시뮬레이션을 통해서 실제로 구성 및 확인하는 방법을 알아봤다.
가상화 솔루션인 SINAMICS DriveSim의 중요한 이점은 다음과 같다.
• 표준 시간 기반 시뮬레이션 도구(Simit, Simcenter Amesim, Matlab Simulink)와 호환된다.
• 실제 SINAMICS 런타임에 대한 테스트 및 검증으로 정확한 동작을 확인할 수 있다.
• 지멘스 온라인 지원 사이트(SIOS)에서 무료로 다운받고 시뮬레이션할 수 있다.
• 최소한의 노력으로 드라이브 시스템 파라미터의 시뮬레이션이 가능하다.
• Functional Mockup Unit(FMU)로 인해 표준화된 상태로 사용이 가능하고, 지속적으로 업데이트된다.
• 실제 드라이브 설정 및 테스트할 수 있는 PROFIdrive 텔레그램 드라이브 및 인코더 시퀀스 컨트롤, 설정 지정 채널, 속도 컨트롤러 및 위치제어가 포함된 DSC 기능까지 가상으로 사전에 쉽게 테스트가 가능하다.
첫 째 날 행사에서는 이외에도 정성문 부장이 ‘지멘스 VTS 가상교육 솔루션’을 주제로 발표를 진행했다.







