
MIT 연구팀이 로봇 매니퓰레이터의 형태와 제어를 최적화하는 새로운 방법을 개발했다(사진. MIT).
미국 MIT 컴퓨터 과학 및 인공지능 연구소(CSAIL) 연구진이 특정 작업에 로봇 매니퓰레이터의 모양과 제어를 연산적으로 최적화하는 새로운 방법을 개발했다.
이 시스템은 소프트웨어를 사용해 설계를 조작하고, 로봇을 시뮬레이션한 다음, 최적화 점수를 제공함으로써 설계 및 제어를 평가한다. 이러한 작업 중심의 매니퓰레이터 최적화는 각 작업이 반복적으로 수행돼야 하는 제조 및 창고 로봇 시스템에서 광범위한 애플리케이션에 대한 잠재력을 가지고 있다.
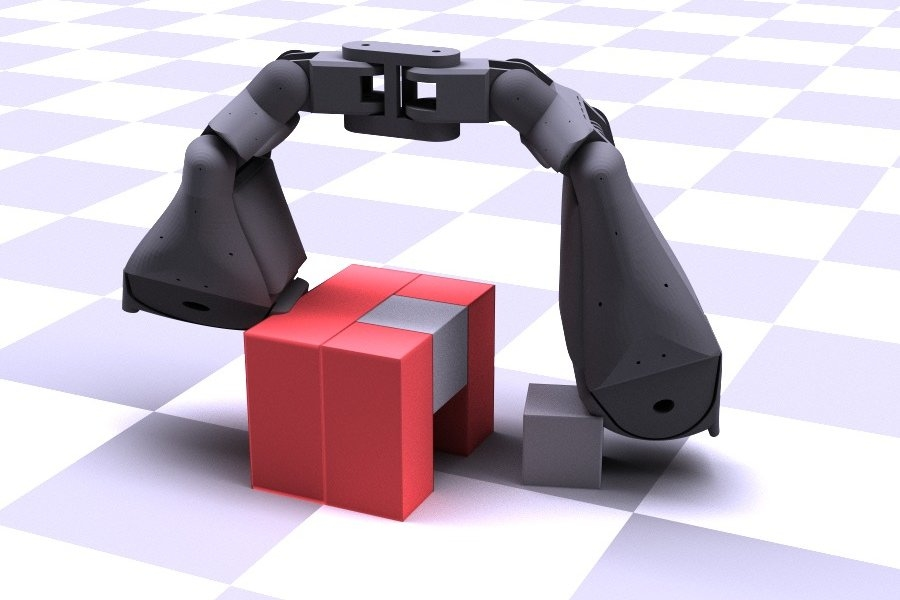
이 시스템의 기능을 테스트하기 위해 연구팀은 우선 지상에서 상자를 뒤집을 수 있는 로봇 손가락을 디자인했다. 후크 선장의 왼손처럼 생긴 손가락 끝 구조는 상자 뒷면에 걸어서 뒤집는 알고리즘에 의해 자동으로 최적화됐다. 또한 연구팀은 두 손가락 디자인이 작은 입방체를 움직일 수 있는 더 큰 마운트에 넣는 조립 작업을 위한 모델을 개발했다. 그 결과 손가락의 길이가 서로 다르기 때문에 크기가 다른 두 개의 물체에 닿을 수 있었고, 손가락의 표면이 더 크고 평평해서 물체를 안정적으로 밀 수 있었다.
이전에는 이 공동 최적화 프로세스 구축을 위해 로봇 설계의 각 구성 요소를 단순화하고 더 원시적인 모양으로 구성했다. 예를 들어 3세그먼트 로봇 손가락을 만들 때는 3개의 연결된 실린더로 근사치를 산출할 수 있는데, 여기서 알고리즘은 원하는 설계와 모양을 달성하기 위해 길이와 반지름을 최적화한다. 이 같은 방식은 최적화 문제를 단순화시킬 수 있지만, 형상을 지나치게 단순화할 경우 설계가 더 복잡해지고 궁극적으로는 작업 난이도가 더 높아지는 문제점이 있다.
이에 연구팀은 보다 복잡한 매니퓰레이터 구축을 위해 기본적으로 사용자가 실시간으로 모양의 형상을 변형할 수 있도록 하는 케이지 기반 변형 기술을 사용했다. 예를 들어 로봇 손가락 주위에 철창처럼 생긴 것을 둘렀다고 가정했을 때 이 알고리즘은 케이지 치수를 자동으로 변경해 정교하고 자연스러운 모양을 만들어낼 수 있다. 여러 디자인으로 무결성이 유지되기 때문에 쉽게 제작할 수 있는 것이 특징이다.
한편 연구팀은 향후 소프트웨어를 확장해 여러 작업에 대해 동시에 매니퓰레이터를 최적화할 계획이다.







