
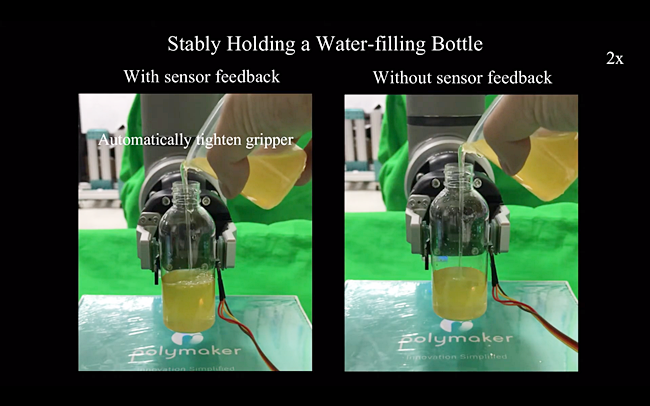
촉각 센서는 병을 그리퍼에 안정적으로 고정할 수 있도록 한다(사진. 홍콩시티대학교).
홍콩시티대학교(City University of Hong Kong) 연구팀이 피부와 유사한 특성을 가진 촉각 센서를 개발해냈다. 손가락 끝에 이 센서가 장착된 로봇 그리퍼는 깨지기 쉬운 물체를 안정적으로 잡고 바늘을 꿰는 것과 같은 까다로운 작업을 수행할 수 있다. 이들의 연구는 촉각 센서 설계에 대한 새로운 통찰력을 제공했으며 스마트 보철 및 인간-로봇 상호 작용과 같은 로봇 공학 분야의 다양한 응용 분야에 기여할 것으로 기대된다.
연구팀이 개발한 센서는 사람의 피부와 같은 다층 구조로 형성돼 있으며, 최상층으로 약 0.5mm 두께의 유연한 필름이 포함돼 있다. 외력이 가해지면 필름의 변형으로 인한 자기장의 변화를 감지할 수 있으며, 외부 힘을 수직력(물체에 수직으로 가해지는 힘)과 전단력의 두 가지 구성 요소로 자동으로 분리 및 분해해 정확하게 측정할 수 있다.
연구 관계자는 “각 힘 구성 요소가 물체에 영향을 미치기 때문에 외부 힘을 분리하는 것이 중요하다. 물체의 고정 또는 이동 상태를 분석하거나 제어하려면 각 힘 구성 요소의 정확한 값을 알아야 한다”라고 밝혔다.
한편 센서는 자극의 위치를 최대한 정확하게 찾을 수 있는 촉각 ‘초해상도’라는 인간의 피부와 같은 특성을 가지고 있다. 셴 박사는 “우리는 딥러닝을 사용해 효율적인 촉각 초해상도 알고리즘을 개발했다. 지금까지 보고된 초해상도 방법 중 최고인 접촉 위치에 대한 위치 정확도를 60배 향상시켰다”라며, “이러한 효율적인 촉각 초해상도 알고리즘은 최소 수의 감지 장치로 촉각 센서 어레이의 물리적 해상도를 향상시켜 배선 수와 신호 전송에 필요한 시간을 줄일 수 있다”라고 밝혔다.
연구팀은 로봇 그리퍼의 손끝에 센서를 장착함으로써 로봇이 어려운 작업을 수행할 수 있음을 증명했다. 일례로 로봇 그리퍼는 외부 힘이 그것을 끌어내려 시도하는 동안 달걀과 같은 깨지기 쉬운 물체를 안정적으로 잡거나 원격 조작을 통해 바늘에 실을 넣을 수 있다.
이들은 센서가 향후 로봇의 전신을 덮는 센서 어레이 또는 연속적인 전자 스킨 형태로 쉽게 확장될 수 있다고 보고 있다. 센서의 두께를 변경하지 않고 센서의 최상층(자기막)의 자화 방향을 변경해 센서의 감도 및 측정 범위를 조정할 수 있다. 이로 인해 e-skin은 사람의 피부처럼 다른 부분에서 다른 감도와 측정 범위를 가질 수 있었다.
또한 이 센서는 다른 촉각 센서에 비해 제작 및 보정 프로세스가 훨씬 짧아 실제 적용이 용이하다. 셴 박사는 “이 센서는 적응형 파악, 손재주 조작, 텍스처 인식, 스마트 보철 및 인간-로봇 상호 작용과 같은 로봇 공학 분야의 다양한 응용 분야에 유용할 것”이라며, “피부와 유사한 특성을 가진 부드러운 인공 촉각 센서의 발전은 가정용 로봇을 우리 일상생활의 일부로 만들 수 있다”라고 밝혔다.







