
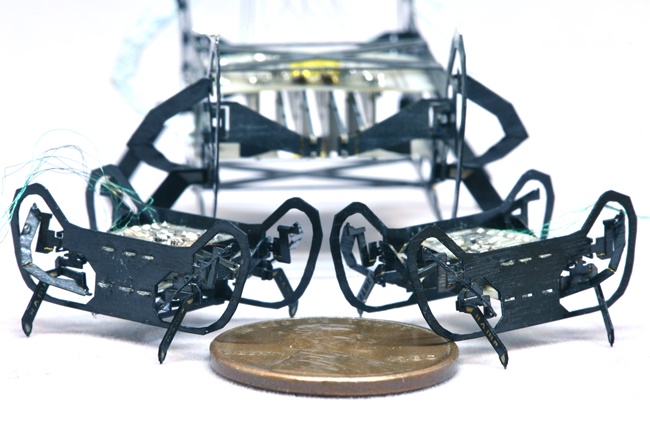
하버드 SEAS가 바퀴벌레에서 영감을 얻은 '마이크로 로봇'을 개발했다. (사진. 하버드 SEAS)
하버드 존 A. 폴슨 공학 및 응용과학 학부(SEAS)의 연구원과 생물학 영감 공학 연구소의 하버드 Wyss 연구소가 협력해 마이크로 로봇을 개발해냈다. 이들은 바퀴벌레에서 영감을 얻은 ‘HAMR-JR’ 로봇을 출시했는데, 이 작은 비트 로봇은 아직 물 분출구를 올라갈 수 없지만 달리고, 뛰어 오르고, 무거운 하중을 운반할 수도 있다.
특히 HAMR-JR은 다양한 업적을 수행할 수 있어 현재까지 가장 손재주가 많은 마이크로 로봇으로 알려져있다. 연구 관계자는 “이 정도 규모의 로봇은 매우 단순하고 기본적인 이동성을 보여준다”라며, “우리는 당신이 손재주나 크기를 조절할 필요가 없다는 것을 보였다”고 밝혔다. 해당 연구는 이번 주 국제 로봇 공학 및 자동화 회의(ICRA 2020)에서 발표됐다.
한편 이 연구에서 큰 문제 중 하나는 이전 버전의 HAMR 및 RoboBee를 포함한 다른 마이크 로봇을 구축하는 데 사용된 팝업 제조 공정으로, 작은 수술용 로봇에서 대형 로봇에 이르기까지 다양한 규모로 로봇을 구축할 수 있는지에 대한 것이다.
PC-MEMS(인쇄 회로 마이크로 전자 기계 시스템의 약자)는 로봇의 구성 요소를 2D 시트로 에칭한 다음 3D 구조로 튀어 나오는 제조 공정이다. 연구원들은 HAMR-JR을 구축하기 위해 액추에이터 및 온보드 회로와 함께 로봇의 2D 시트 디자인을 축소해 동일한 기능을 모두 갖춘 작은 로봇을 재현한다.
관계자는 “해당 연습에서 가장 좋은 점은 이전 디자인에 대해 아무것도 바꿀 필요가 없다는 것”이라며 ,“이 프로세스는 기본적으로 다양한 크기의 모든 장치에 적용할 수 있음을 증명한다”고 전했다.
HAMR-JR은 몸 길이가 2.25㎝이고, 무게는 약 0.3g으로 실제 페니 무게의 일부이다. 또한 초당 약 14개의 길이를 사용할 수 있어, 가장 작고 빠른 마이크로 로봇으로 알려져있다.
축소는 보폭과 관절 강성 등을 제어하는 일부 원칙을 변경하므로, 연구진은 목표 크기를 기준으로 달리기 속도, 발 힘 및 페이로드와 같은 운동 메트릭을 예측할 수 있는 모델을 개발했다. 이로써 이 모델을 사용한 필요한 사양의 시스템을 설계할 수 있게 됐다.







