
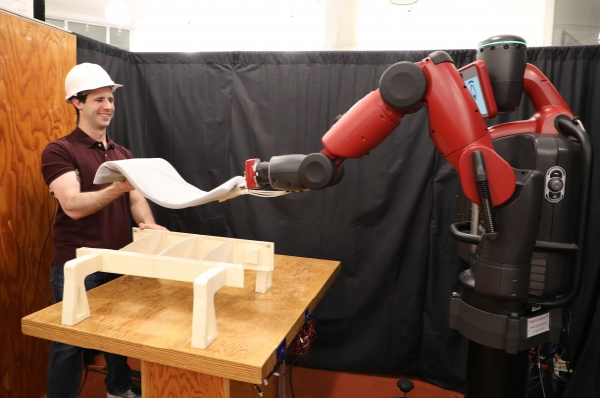
로보레이즈 실험 모습(사진. MIT컴퓨터과학·인공지능연구실)
로봇은 사용자가 구체적인 지시를 내리면 특정 행동을 능숙하게 수행할 수 있다. 그러나 만약 로봇이 사람의 움직임을 인식하고, 이를 신호로 받을 수 있다면 로봇과 인간의 협력은 더욱 원활해질 수 있다. MIT의 과학자들은 이 같은 아이디어를 기반으로 실제 인간의 움직임에 의해 제어되는 로봇 팔을 개발했다.
MIT뉴스는 MIT 연구진이 사람의 이두박근과 삼두박근의 움직임을 인식해 제어되는 ‘로보레이즈(RoboRaise)’를 개발했다고 전했다.
연구진은 리씽크로보틱스의 벡스터(BAXTER)를 베이스 플랫폼으로 활용해 로보레이즈 시스템을 구축했으며, 근육의 활동을 추적하기 위해 인간의 팔뚝과 삼두박근에 부착된 비침습적 EMG 센서를 사용했다. 이 센서는 사용자가 팔을 구부리거나 펼 때, 근육의 이완 시 발생되는 전기 신호를 모니터링하고, 로봇에 적용된 특수 목적 알고리즘은 이 신호를 로봇의 명령어로 변환한다.
한편 MIT뉴스에 따르면 연구진은 로보레이즈와 인간의 협력을 통해 딱딱하거나 유연한 물체로 항공기 모형 부품을 조립, 약 70%의 동작에 정확하게 반응하는 것을 발견했다.







