글로벌 공압&전동 기업 훼스토(FESTO)의 ‘Bionic Learning Network(이하 BLN)’는 세계 생체모방로봇 관계자들이 주목해야 될 프로젝트이다. BLN은 유명 대학 및 연구소, 개발 기업, 개인 발명가를 연결하는 연구 네트워크로 공개적이면서도 역동적인 구성원 간의 교류가 인상적이다.
생체모방로봇 분야를 언급할 때 훼스토는 빠질 수 없는 이름이다. 1990년대부터 생물학적 기능성을 공학적으로 구현하는 것에 관심을 가졌던 훼스토는 사실상 생체모방로봇 연구 분야를 랩 단위 밖으로 이끌어낸 기업이라고 볼 수 있다. 특히 2006년 이 회사는 BLN를 구축하면서 생체모방로봇 관련 글로벌 산·학·연의 협력을 실현했다.
훼스토는 1990년대 초반부터 바이오닉스 분야에 집중적으로 대응해왔으며, 2006년 BLN을 시작하면서 다양한 관계자들과 역동적으로 아이디어를 공유해왔다. 핵심 팀은 엔지니어와 디자이너, 생물학자 및 훼스토의 학생 등으로 구성되며, 개방적인 구성원 간의 팀워크로 산업 응용 분야, 미래 표준 제품 등에 대한 새로운 시각과 영감을 세계에 소개했다.
History of BLN
2006~2009
• Air Penguin
공중을 날아다니는 Air Penguin은 앞·뒤로 핀 레이 효과가 적용된 3D구조를 이용해 실제 펭귄처럼 물속을 미끄러지듯이 움직인다.
• Aqua Penguin
유선형 동체를 지닌 Aqua Penguin은 에너지 효율이 우수하고, 날개의 추진력으로 좁은 공간에서도 기동이 가능하다. 마치 돌고래처럼, 3D 수중 음파 탐지기를 사용해 주변의 다른 Air Penguin과 통신하며, 이를 통해 충돌을 방지한다.
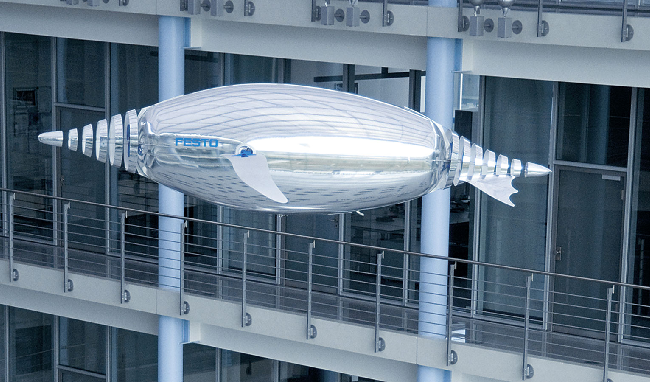
• Air Jelly
Air Jelly는 지난 ‘2017 대한민국과학창의축전’에 소개된 바 있는 생체모방로봇으로, 마치 해파리가 유영하는 듯한 모습으로 하늘을 떠다닌다. 8개의 촉각을 가지며, 이들은 전기 드라이브의 힘을 흡수하고, 반동 원리를 이용해 공중을 난다. 중앙 드라이브 외에도 충전용 배터리와 헬륨으로 채워진 몸통이 필요한 부력을 제공한다.
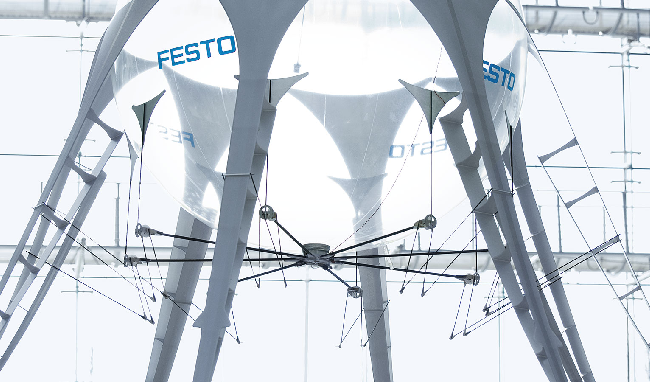
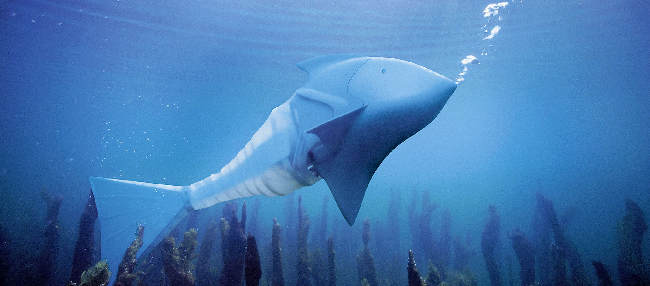
• Air Ray
하늘을 나는 가오리 로봇이다. 유량이 최적화된 광선의 모양은 공기역학적 효율을 높이는 반면, 날개의 능동적인 비틀림은 탁월한 힘을 제공한다. 서보모터는 양 날개가 세로 방향으로 번갈아 당겨 위아래로 움직이도록 한다. 이 밖에 BNL은 물속을 유영하는 Aqua Ray도 선보였다.

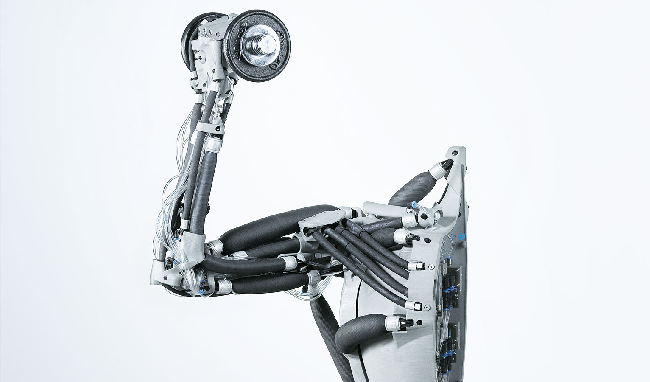
• Airic's_arm
Airic's_arm은 메카트로닉스와 인간의 생물학적 모델을 결합한 로봇으로, 미래의 자동화된 모션 시퀀스를 위한 새로운 옵션을 제시한다. 뼈와 근육을 갖추고 있으며, 30개의 공압식 근육이 인공 골격을 움직인다. 실제 인체와 유사한 관절 구조로 제작된 것이 특징이다.
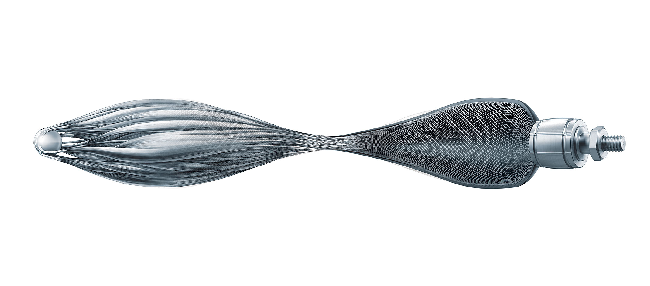
• Fluidic Muscle
BLN의 일환으로 훼스토는 인간의 움직임에 매우 근접한 시퀀스를 가능하게 하는 인공근육을 개발했다. 아라미드 섬유가 적용된 중공 엘라스토머 실린더로 구성되며, 유체 근육이 공기로 채워지면 직경이 증가하고 길이가 줄어들어 유동적인 탄성운동이 가능하다.
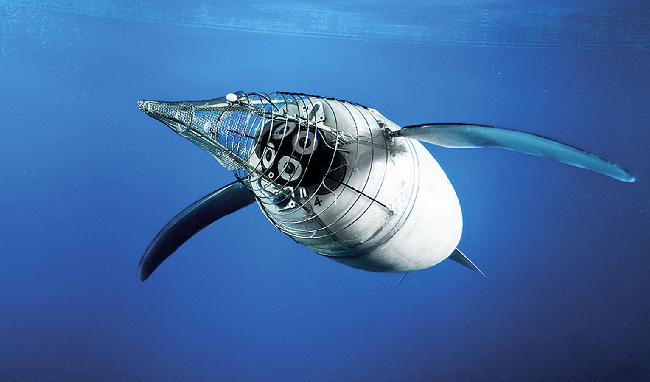
• Airacuda
핀 드라이브가 장착된 Airacuda는 공기압으로 구동되는 물고기 로봇으로, 모양 및 운동학 측면에서 생물학적 모델을 차용했다. S자 형태로 움직이는 유체근육은 꼬리지느러미의 유연한 조향각도를 구현했다.
2010~2012
• ExoHand
엑소핸드는 유저의 손가락 움직임의 범위를 시뮬레이션하기 위해 각 손가락에 유압 액추에이터를 적용했고, 이 액추에이터는 손가락을 움직이는 등의 역할을 수행한다. 또한 엑소핸드에 적용된 PLC 호환 컨트롤러는 비선형 제어 알고리즘이 CoDeSys(프로그래밍 컨트롤러에 적용되는 IEC 61131-3 국제산업 규격 개발 환경)상에 적용됐는데, 이를 통해 손가락 개개의 관절이 올바른 위치와 힘, 정밀한 모션을 구현할 수 있도록 컨트롤할 수 있다. 덧붙여 장갑의 뒷부분에 설치된 파워부스터 시스템을 통해 유저의 악력을 2배가량 증가시킬 수도 있다.

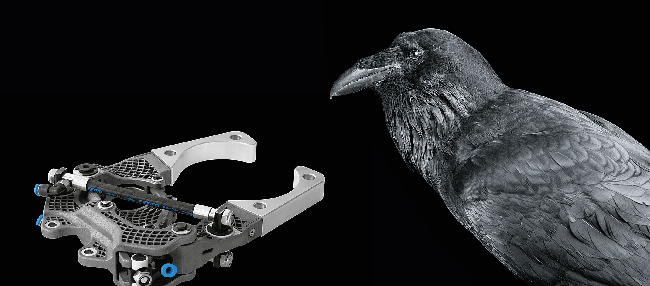
• PowerGripper
PowerGripper는 새의 부리를 모델로 한 그리퍼로, Bird's Beak의 복잡한 운동학을 모델로 삼았다. 훼스토의 DMSP-5 Fluidic Muscle을 사용해 생체 공학 원리를 구현했으며, 매우 가벼운 공압 근육과 티타늄 합금을 이용함으로써 우수한 중량 대비 힘 효율을 구현했다.
• Smart Bird
에어젤리와 함께 ‘2017 대한민국과학창의축전’에서 소개된 바 있다. 청어 갈매기에서 영감을 얻은 이 초경량 비행 모델은 뛰어난 공기 역학과 민첩성으로 주목을 받았다. 추가 드라이브 없이 이·착륙할 수 있는 이 로봇을 위해 훼스토는 새의 날갯짓을 기술적으로 해독해 비행에 적용했다.

• Bionic Handling Assistant
훼스토가 프라운호퍼 IPA 팀과 협력해 개발한 Bionic Handling Assistant는 코끼리 코를 모델로 작동구조와 작동방식을 만든 가볍고 유연한 시스템이다. 훼스토는 이 Bionic Handling Assistant의 유연성으로 인해 사람과 기계 사이에 직접적이면서 안전한 접촉이 가능하게 됐다고 설명했다.

2013~2014
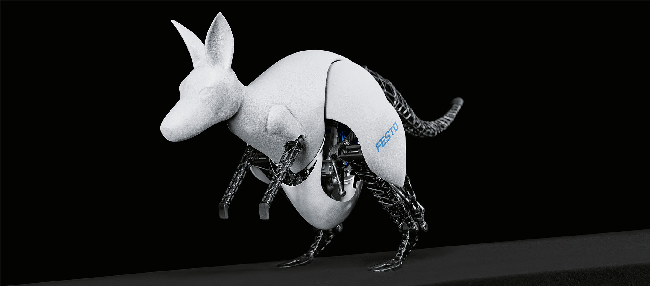
• BionicKangaroo
역학적 측면에서 캥거루의 점핑 구조는 에너지를 추가적으로 사용하지 않고도 속도를 높일 수 있는 구조로, 훼스토는 고속 스위칭 밸브인 MHE2와 CECC 컨트롤 시스템, 특수한 암 밴드 형 컨트롤러, 고무 소재 탄성 스프링 및 모니터링 시스템을 통합해 무게 7㎏, 높이 1m의 사이즈로 높이 40㎝, 거리 80㎝까지 점프할 수 있는 캥거루 로봇을 만들었다.
• MultiChoiceGripper
MultiChoiceGripper는 엄지를 이용해 물건을 잡는 인간의 파지법에서 영감을 얻었다. 3개의 손가락으로 구성된 이 그리퍼는 다양한 모양에 적응하는 유연성을 보여주며, 이에 따라 센서나 제어 기술을 추가하지 않고도 다양한 모양의 물체를 민감하게 파지할 수 있다.

• BionicOpter
BionicOpter는 잠자리 형태를 모방한 초경량 비행로봇이다. 초경량 인텔리전스 디자인이 적용된 비행로봇으로, 날갯짓의 빈도 및 크기와 개별 날개의 수평각도 조절이 가능해 공간 위에서 어느 곳으로든 진행하는 방향과 속도 및 가속도를 제어할 수 있다. 또한 고도로 집적된 지능적인 메커니즘은 실내외를 막론하고 진동이 보정된 안정적인 비행을 보장한다.

2015~2017
• Bionic Motion Robot
Bionic Motion Robot의 움직임은 코끼리의 코와 문어의 촉수에서 영감을 얻었다. 이 공압·경량 로봇은 12자유도를 자랑하며, 3㎏로 매우 가볍다. 튼튼한 벨로우즈 구조로 제작됐으며, 2010년 개발된 Bionic Handling Assistant를 기반으로 하고 있다.

• Bionic Cobot
ROS 기반의 Bionic Cobot은 민감한 움직임으로 많은 작업들을 해결할 수 있으며, 인간과 직접적으로 안전하게 작업이 가능하다. 7개의 관절로 구성된 이 공압 로봇 팔은 충돌 발생 시 자동으로 느슨해지며 사람의 안전을 지켜준다.

• Free Motion Handling
자율 비행 그리핑은 오랫동안 BLN의 주제였다. Free Motion Handling은 이 두 가지 영역을 결합한 연구로, 자유롭게 움직이고, 필요한 곳에 독립적으로 물건을 집거나 떨어뜨릴 수 있다.

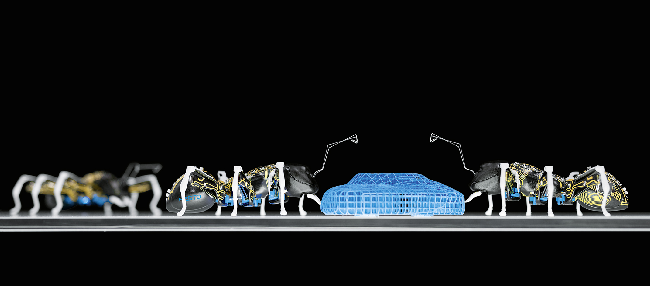
• Bionic ANTs
Bionic ANTs는 개미의 섬세한 해부학 모델을 참고했다. 이 로봇은 복잡한 제어 알고리즘을 활용해 생물의 협동 행동을 기술의 세계로 옮겼다는 평가를 받고 있으며, 또한 독특한 생산 방법으로 주목받았다.
• eMotion Butterflies
비행은 BLN에서 종종 반복되는 주제이다. 개발자들은 Bionic Opter 및 eMotion Spheres 프로젝트에서 얻은 지식을 기반으로 나비로봇을 개발했다. 최대한 자연에 가까운 역할 모델을 재현하기 위해 이 나비로봇은 고도로 통합된 온보드 전자 장치를 탑재하고 있다. 로봇나비의 날개는 약간 겹쳐지면서 날개 사이에 공기 틈이 발생, 특별한 공기 역학을 발생시킨다.

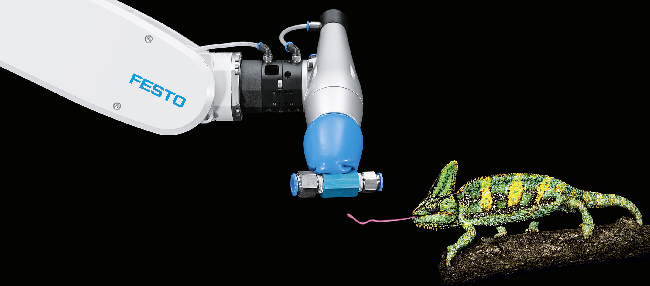
• Flex Shape Gripper
Flex Shape Gripper는 카멜레온이 혀를 말아 곤충을 잡는 형상에서 아이디어를 얻었다. 탄성 실리콘 갭을 사용해 수동으로 변환할 필요 없이 한 번에 여러 개의 물체를 집을 수 있으며, 기존의 철제 그리퍼와 달리 쉽게 파손될 수 있는 물체도 유연하게 파지할 수 있다.