
로봇이 적용되는 현장에서는 항상 예상할 수 없는 변수가 발생된다. 본지에서는 네이버 카페 ‘로봇기술’에 문의된 실무 현장의 애로사항을 소개하고, 실제 현장에서 활약하고 있는 전문가들의 답변을 선정해 함께 소개한다.
ABB CC링크 관련
Q. ABB로봇 CC링크(378B)를 설정 도중 Connection Output/Input Size에 대해 이해가 되지 않습니다.
[사진]처럼 -1로 설정하니 I/O신호가 I/O장비 데이터 영역 외부에 맵핑됐다는 ‘71362’ 이벤트 메시지가 뜹니다. 2로 바꿔주면 ‘71362’ 메시지는 뜨지 않습니다. 비트와 바이트로 인해 표시된 입/출력 데이터 영역의 크기가 결정된다고 매뉴얼에 적혀있는데, OccStart와 BasiclO가 무엇을 의미하는지 잘 모르겠습니다. 설명 부탁드립니다.
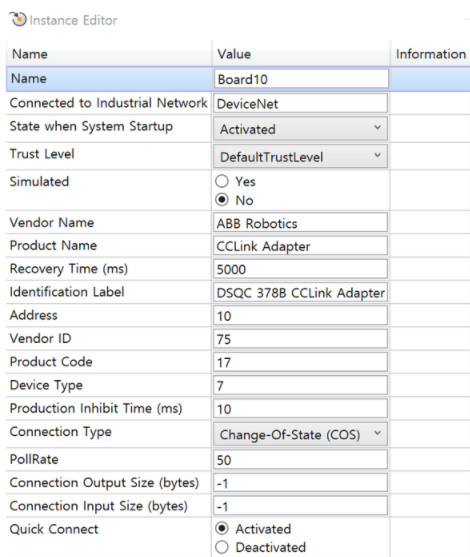
A. 디바이스 커멘드 설정에 스테이션 번호는 PLC에서 로봇 CC링크에 할당된 선두 스테이션 번호가 등록되고, OccStart는 할당할 I/O 영역 설정하는 겁니다.
1~4까지가 설정값이고, 최대값인 4를 설정하게 되면 CC링크 스테이션 할당이 4국을 차지해 비트통신으로 최대 입력 112개, 출력112개가 설정됩니다.
BasiclO는 통신 설정을 비트 통신전용으로 쓸 건지 아니면 비트 및 워드 겸용 통신으로 쓸 건지 설정하는 겁니다. 0이면 비트 통신, 1이면 비트 워드 겸용 통신입니다. 통상적으로 BasiclO는 별도로 설정하지 않고 기본값인 0을 사용합니다.
나치후지코시 스탑시그널 오류
Q. 스탑시그널 관련 오류가 났는데 이것 때문에 작동이 안 됩니다. 셋업할 때도 애먹었는데 처음부터 셋업이 잘못된 건가요?

A. U1~U9 가운데 외부로부터 정지 신호가 입력되는 중, 해당 유닛에 대해 외부로부터 시작 신호가 입력될 때, 이 알람이 발생합니다.
매뉴얼의 취급장치 설명서 ‘기본 입·출력 신호’ 부분에 나와 있습니다. 참고하세요.
ABB 37062 알람
Q. ABB를 사용하고 있습니다. 컴퓨터모듈 P/S 교체 후에도 ‘37062’ 알람이 계속 발생합니다. 도와주세요.
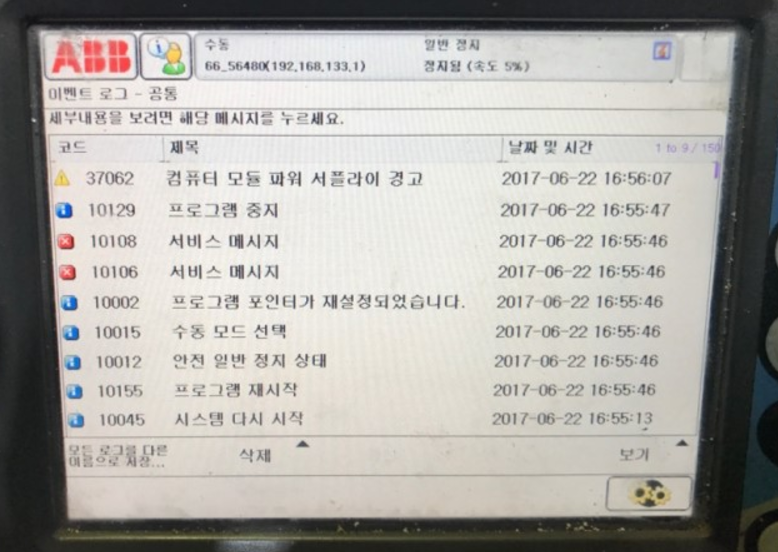
A. 전원 공급 장치는 종류가 다양합니다. 37062 알람 발생시 우선 DSQC625의 교체가 필요합니다. 추가로 선로 접촉상태를 확인하고, RobotWare Upgrade도 실시하세요.
야스카와 원점 위치 설정
Q. 작업 원점(Work Home Pos) 외에 로봇 원점을 맞춰야 한다고 알고 있습니다.
펜던트 관리모드로 들어간 후 메인에서 [Robot]→[Home Position] 클릭하고 매니퓰레이터의 전축을 화살표, 즉 0점에 맞춘 후 [Edit]→[Select All Axis] 클릭하면 원점이 맞춰지는 건가요? 그리고 원점을 등록해야하는 궁극적인 이유가 궁금합니다.
A. 기체 본체의 영점 데이터(모터 옵셋값)는 [Robot]→[Home Position]에서 등록합니다. 이때 전축 일괄등록 또는 각 축 개별등록을 할 수 있습니다.
공장 출하 시에는 3차원 레이저로 측정해 기계 본체 영점을 등록하지만 사용자가 모터나 감속기 교체 후 직접 재등록해야만 할 때는 야스카와 로봇의 경우 단순히 측정하는 사람의 눈에만 의지해야하므로 정확한 위치가 등록된다고 확신할 수 없습니다. 그래서 최대한 원점마크가 일치하는 위치에서 등록하도록 합니다.
로봇기술 http://cafe.naver.com/robotzine







