로봇이 적용되는 현장에서는 항상 예상할 수 없는 변수가 발생된다. 본지에서는 네이버 카페 ‘로봇기술’에 문의된 실무현장의 애로사항을 소개하고, 실제 현장에서 활약하고 있는 전문가들의 답변을 선정해 함께 소개한다.
ABB 부가축 변경
Q. ABB Robot Studio 레이아웃 상에 기본으로 제공되는 트랙 설치 후 로봇동작을 하려고 합니다. 트랙의 왼쪽 방향이 보통 0(기준점)이 됩니다. 이것을 오른쪽으로 바꾸는 방법이 있을까요?
A. Track Motion 설정 단계에서 Mirroring을 선택하세요. 추가로 Base Frame 수정이 필요할 수도 있
습니다.
ABB Offset
Q. 현재 ABB 로봇을 PC로 제어하고 있습니다. Vision Checking 후 보정값에 대해 T(6축)값을 Offset 하려고 합니다. 도와주세요.
A. joinCurrent := CJoinT();
joinCurrent.robax.rax_6 := CJoinT().robax_6 + PcData;
MoveAbsJ jointCurrent, v1000, z50, toolUsing;
가와사키 A/S 언어
Q. 변수명 = PLCAIN(번호)
PLCAOUT(번호) = 변수명
위의 명령이 정확히 어떤 의미인가요?
A. CC-LINK 기반 데이터 교신용 명령입니다. 예제 참고하세요.
<예제>
# to read you may use:
FOR .tmp = 1 TO 8
cclinkreg[.tmp] = PLCAIN(.tmp)
END
# to read you may use:
FOR .tmp = 1 TO 8
PLCAIN(.tmp) = cclinkreg[.tmp]
END
float 기능 설명
Q. 로봇 float기능에 대해서 설명 부탁드립니다. 그리고 이 기능은 언제 사용하나요?
A. 주로 부동소수점(floating point)을 표현할 때 쓰는 용어입니다.
↳ Q. 감사합니다. 그럼 floating point 기능은 왜 필요합니까?
↳ A. 부동소수점이란 소수점 위치가 고정이 아니라는 뜻입니다.
아주 큰 수와 작은 수를 표현하는 방법 중 하나이며, 12345를 12345E-4로 표현합니다
현대로보틱스 로봇 리밋 설정
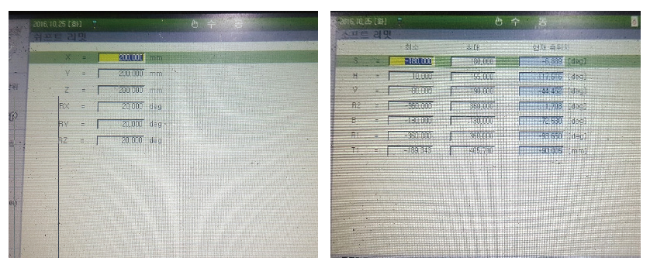
Q. 현대로보틱스 로봇을 6개월 정도 사용하고 있습니다. 리밋 설정 방법을 알고 싶습니다. 아래 두 개의 다른 소프트 리밋 창이 있는데 뭐가 다른지 궁금합니다. 또한 7축 건터치 하는 부분이 ATD 절삭을 얼마하지 않고 리밋이 걸리는데 이걸 어떻게 설정하는지 궁금합니다.
A. 첫 번째 사진은 쉬프트 리밋 메뉴입니다. 로봇 좌표를 시프트 시킬 때 그 거리의 제한 범위를 설정하는 메뉴입니다. 두 번째 사진은 로봇 축동작범위 소프트 리밋 설정 메뉴입니다. 리밋을 설정하는 방법은 T1 항목의 범위를 조정해 주세요. 건출 설정 상태에 따라 가압 방향이 달라지므로 어떤 값을 늘려야 한다고 단정 지을 수는 없습니다. 가압할 때 -값으로 이동하는지 +값으로 이동하는지 확인 후 최대값 또는 최소값을 변경해 주세요. 변경방법은 변경을 원하는 필드에 커서를 위치시킨 후 원하는 값을 입력하고 엔터를 쳐서 그 값을 확정하고 최종 F7 종료를 눌러서 화면에서 빠져나가세요. 그래야만 최종 저장됩니다. 값 변경 후 전원 리부팅은 필요 없습니다